



На сегодняшний момент построение многоканальных комплексов импульсных лазеров является задачей, решаемой многими методами в зависимости от назначения и принципа работы конкретного комплекса. Наряду с системами, использующими метод когерентного сложения излучения лазерных модулей [4, 5], вызывают интерес системы, построенные по принципу последовательного суммирования излучения. В таких системах лазерные модули генерируют импульсы излучения последовательно, в порядке их очередности. Излучение модулей системы сводится на цели при помощи оптического коммутатора – быстродействующего манипулятора, чьим рабочим органом является призма или зеркало. Оптический коммутатор позиционирует призму таким образом, чтобы последовательно сводить оптические каналы лазерных модулей на единый тракт в моменты их работы. Таким образом, на цель попадает серия лазерных импульсов, представляющая собой квазинепрерывное лазерное излучение при высоких частотах коммутации каналов комплекса. В подобном комплексе оптические тракты лазерных модулей геометрически формируются матрицей сведения (состоящей из зеркал) и приводятся к необходимому взаиморасположению (например, нахождению в одной плоскости и радиально сходящихся на призме коммутатора). Коммутатор, представляющий собой однокоординатный привод вращения призмы, последовательно опрашивает оптический тракт каждого модуля, позиционируя призму таким образом, чтобы излучение модуля попадало в формирующий телескоп. Таким образом, оптические тракты лазерных модулей последовательно сводятся в одну оптическую ось и направляются телескопом в необходимую цель.
Наряду с достоинствами, такими, как высокая средняя мощность излучения, относительно высокая продолжительность работы и масштабируемость, комплекс обладает существенным недостатком – необходимостью введения дополнительных юстирующих средств в оптические каналы модулей. Данная необходимость диктуется разъюстировками лазерных модулей, возникающими ввиду изменения климатических условий и представляющими угловые и линейные уводы излучения от изначальной оси. В такой ситуации в канал модуля вводится клиновой компенсатор (два оптических клина), обладающий возможностью юстировки излучения по двум угловым координатам. Данное юстирующее устройство существенно снижает КПД оптического тракта модуля вследствие отражения части излучения на гранях клиньев (около 4 % на грань) и рассеяния излучения в тепло в теле клина.
В такой ситуации снижение потерь излучения в системе достигается интеграцией функции юстировки в оптический коммутатор с последующим исключением из системы дополнительных оптических элементов (оптические клинья, зеркала и призмы матрицы сведения). Конкретным решением здесь является построение быстродействующего многокоординатного манипулятора, обладающего функционалом коммутации и автоматической юстировки излучения, на базе механизма с параллельной кинематикой типа «гексапод» [1]. Быстродействующий оптический коммутатор многоканальной лазерной системы, построенный на базе гексапода, является 6-координтаным манипулятором, осуществляющим, помимо коммутации оптических каналов, компенсацию разъюстировок лазерных модулей [2, 3]. 3D-модель прототипа оптического коммутатора на базе гексапода представлена на рис. 1.
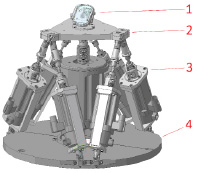
Рис. 1. Оптический коммутатор на базе гексапода. 1 – призма; 2 – подвижная платформа; 3 – линейный привод; 4 – неподвижная станина
При работе коммутатора компенсация разъюстиовок достигается своеобразным позиционированием призмы при коммутации каналов, таким, что лазерный луч разъюстированного модуля при прохождении через призму попадает в целевую точку. В основе данной функции лежит главная обратная связь системы по положению лазерного пучка, определяющая степень увода излучения от эталонной оси. Введение такой обратной связи позволяет судить о положении оси излучения, которая является не полностью наблюдаемой координатой до введения главной обратной связи.
Цель исследования
Целью настоящего исследования является формирование архитектуры, математического базиса и выбор элементов, образующих главную обратную связь в системе автоюстировки многоканальных лазерных комплексов.
Материалы и методы исследования
Объектом исследования является многоканальная система твердотельных лазерных модулей на неодимовом стекле с длиной волны излучения λ = 1,06 мкм и длительностью импульса излучения 6 мс.
Формирование главной обратной связи сводится к построению сенсорной системы, фиксирующей положение оси излучения в пространстве для определения отклонения её от эталонного положения. В процессе работы модуля ось его излучения может претерпевать уходы от эталонной оси в вертикальной и горизонтальной плоскостях, причем составляющие могут быть как линейными, так и угловыми. Таким образом, сенсорная система должна формировать сигнал по 4 составляющим разъюстировки: вертикальной угловой, вертикальной линейной, горизонтальной угловой и горизонтальной линейной. Поскольку энергия импульса исследуемых модулей может постигать 2000 Дж, формирование обратной связи непосредственным наблюдением за осью излучения опасно. Здесь решением является отвод части излучения с помощью плоскопараллельных светоделительных пластин на диффузный экран и наблюдение за позицией световых пятен на нем с помощью видеокамеры, снабженной светофильтрами. Поскольку необходимо определение 4-х составляющих разъюстировки, в системе должны быть установлены 2 светоделительные пластины для однозначного определения положения оси излучения в 3-мерном пространстве. Схема, иллюстрирующая взаиморасположение элементов сенсорной системы, приведена на рис. 2.
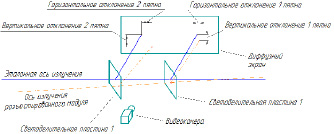
Рис. 2. Взаиморасположение элементов сенсорной системы
Поскольку работа в системе идет на длине волны λ = 1,06 мкм, для отвода излучения применяются пластины из кварцевого стекла КУ ГОСТ 15130-86 с просветлением неотводящей поверхности на длину волны λ = 1,06 мкм для минимизации вторичного пятна.
Поскольку лазерная система работает в импульсно-периодическом режиме с возможность настройки длины серии и частоты следования импульсов, наблюдение за световыми пятнами должно вестись в режиме видеозаписи с последующим анализом отдельных кадров. Длительность импульса излучения составляет 6 мс и имеет приблизительно равные по длительности области фронта, пика мощности и спада. Для гарантированного захвата кадра на пике мощности импульса необходима частота камеры, определяемая по формуле (1):
 (1)
(1)
где υ – частота следования кадров видеосъемки; Т – длительность импульса излучения.
Полученное значение частоты 500 Гц соответствует скоростным камерам. Здесь может быть применена скоростная видеокамера Fastvideo-500 производства НПО «Астек», обладающая частотой 500 Гц при разрешении 640х320 пикселей, подключаемая к стандартному персональному компьютеру. Видеофайл, записываемый камерой в процессе съемки, представляет собой последовательность блоков (кадров) по 204800 байт. Каждый байт определяет яркость соответствующего пикселя. Каждый кадр содержит 2 световых пятна, соответствующих отведенным пучкам.
Определение позиции пятен на кадре сводится к последовательности действий:
- нахождение засвеченных пикселей, принадлежащих к световым пятнам;
- определение принадлежности пикселя к конкретному пятну;
- вычисление весовых центров световых пятен.
Результаты исследования и их обсуждение
Пиксель светового пятна обладает заведомо большей яркостью, чем фон, поэтому принадлежность некоторого пикселя p к множеству засвеченных пикселей Z определяется законом (2):
 (2)
(2)
где f(p) – яркость пикселя; fфон – яркость фоновых пикселей, определяемая шумом видеоматрицы в случае общего затемнения окружающего пространства.
Принадлежность i-го пикселя к конкретному пятну устанавливается исходя из области его расположения на кадре (в левой или правой половине) и определяется законом (3):
 (3)
(3)
где w(pi) – положение пикселя по горизонтали; Z1, Z2– множества пикселей 1-го и 2-го пятен.
Определение координат весового центра пятна сводится к нахождению среднего арифметического значения координат n пикселей, составляющих его. Расчеты ведутся в соответствии с системой уравнений (4):
 (4)
(4)
где w(Z), h(Z) – координаты центра пятна по горизонтали и вертикали соответственно; h(pi) – положение пикселя по вертикали.
При разрешении видеокадра 640 х 320 пикселей отклонения световых пятен определятся системой уравнений (5):
 (5)
(5)
где Δх1, Δу1 – отклонения центра 1-го пятна по горизонтали и вертикали соответственно; Δх2, Δу2 – отклонения центра 2-го пятна по горизонтали и вертикали соответственно.
На основе данных по отклонениям световых пятен можно сделать выводы о положении оси излучения модуля в пространстве и определить разъюстировки. Нахождение угловых разъюстировок идет в соответствие с системой уравнений (6):
 (6)
(6)
где ΔAV, ΔAН – вертикальная угловая и горизонтальная угловая разъюстировки соответственно; Lе – расстояние между светоделительными пластинами.
Определение линейных разъюстировок идет в соответствии с системой уравнений (7):
 (7)
(7)
где ΔLv, ΔLh – вертикальная линейная и горизонтальная линейная разъюстировки соответственно; Lm – расстояние между модулем и первой светоделительной пластиной.
На основе полученных параметров разъюстировки (ΔAv, ΔAh, ΔLv, ΔLh) рассчитываются корректировочные координаты оптического коммутатора. Данные координаты определяют юстировочные перемещения гексапода по осям X, Y и Z и вращение вокруг этих осей. Перемещение призмы по 6 степеням подвижности позволяет позиционировать её таким образом, что оптический тракт коммутируемого модуля пролегает через целевую точку.
Математический базис, сформированный в процессе исследования, вкладывается в программу, установленную на персональном компьютере и реализующую собой главную обратную связь в системе автоюстировки. Данная программа способна: управлять скоростной камерой, анализировать видеофайл в соответствии с законами (2) и (3), находить позицию пятен в соответствии с формулами (4) и (5), находить разъюстировки модулей в соответствии с формулами (6) и (7), выдавать данные по юстирующим перемещениям в контроллер приводов гексапода по интерфейсу Ethernet. Окно подобной программы, созданной в среде Borland Delphi 7, представлено на рис. 3.
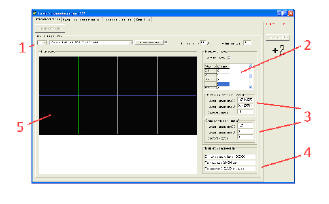
Рис. 3. Окно программы главной обратной связи системы автоюстировки: 1 – область задания анализируемого видеофайла; 2 – список кадров с пятнами; 3 – поля информации о пятнах; 4 – поле информации о видеофайле; 5 – область отображения кадра с указанием позиции световых пятен
Выводы
Сенсорная система снабжена скоростной камерой Fastvideo-500 с частотой следования кадров 500 Гц. Данная камера позволяет наблюдать за осью излучения и в дальнейшем подвергать кадры видеофайла анализу.
Вычисления разъюстировок на основе выведенных законов нересурсоемки и были положены в основу программного обеспечения, формирующего главную обратную связь системы автоюстировки излучения многоканальной лазерной системы.
Рецензенты:
Гоц А.Н., д.т.н., профессор кафедры «Тепловые двигатели и энергетические установки», ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых», г. Владимир;
Кульчицкий А.Р., д.т.н., доцент, главный специалист ООО «Завод инновационных продуктов «Концерн тракторные заводы», г. Владимир.
Работа поступила в редакцию 24.06.2014.