



В последнее время появилось большое число работ, посвященных разработкам многослойных нейронных сетей (НС). НС доказали свою эффективность при управлении сложными объектами [5, 6, 9, 10]. Дальнейшие перспективы нейронного управления [10] связаны с указанием параллелей между классической теорией адаптивного управления и подходов к построению нейрорегуляторов (НР) на основе НС. НС являются нелинейными системами, пригодными для решения практических задач управления, принципиально связанных с наличием нелинейных характеристик. НС позволяют устранить количественную неопределенность информации, поскольку после обучения могут за счет интерполяции (эмуляции) и экстраполяции (адаптации и прогнозирования) входо-выходных характеристик физического объекта выдавать верное решение для получения новой информации, не входящей в обучающий набор.
Аналогичную функцию выполняют традиционно используемые адаптивные системы. Адаптивный подход предполагает наличие линейной математической модели, основанной на физических явлениях, и оценку неизвестных параметров, включенных в эту модель.
Основной недостаток НС, организованных по последовательной схеме, - медленная сходимость алгоритмов адаптации (обучения и управления) в реальном времени - существенно ограничивает практическое применение нейронного управления. Существующие схемы нейронного управления оказываются квазиадаптивными с настройкой вне темпа процессов управления либо, будучи, по сути, адаптивными, недостаточно обоснованными из-за сложностей анализа работоспособности, устойчивости, качества и достижения целей управления [7].
Предлагаемый в работе подход к совмещенному синтезу (синтезу в реальном или в ускоренном времени) нейрорегуляторов технологических процессов направлен на преодоление этих сложностей.
1. Постановка задачи нейронного управления
Рассмотрим технологический процесс (ТП), состоящий из l взаимодействующих технологических модулей (ТМ). ТМ имеют общую, известную заранее структуру, и отличаются только переходами от j-го входа к i-му выходу ТП. Полагаем, что каждый ТМ выполняет определенную функцию сложного ТП и описывается последовательным соединением линейной дифференциальной системы (линеаризованной на интервале дискретизации (наблюдения) нелинейной системы обыкновенных дифференциальных уравнений) объекта и нелинейного безынерционного преобразователя (НБП) - однослойного персептрона (искусственного нейрона). Такие ТМ образуют класс абсолютно устойчивых нелинейных систем [2].
Уравнения j-го ТМ ( ) имеют вид
) имеют вид
 (1)
(1)
 (2)
(2)
 (3)
(3)
Индекс j для краткости записей переменных и параметров системы уравнений (1)-(3) опускаем. В дальнейшем полагаем, что система (1) должна удовлетворять требованиям существования и единственности решения; n-вектор неконтролируемых возмущений  .
.
В формулах (1)-(3) обозначено:  - n-мерный вектор состояния j-го ТМ,
- n-мерный вектор состояния j-го ТМ,  ;
;
u - управление j-м ТМ (измеряемый скалярный вход системы (1)),  ;
;
z - наблюдение j-м ТМ (измеряемый скалярный выход системы (1)),  ;
;
A - постоянная параметрически неопределенная матрица Якоби размерности n×n;
 - постоянный вектор настраиваемых параметров НБП размерности n×1;
- постоянный вектор настраиваемых параметров НБП размерности n×1;
 - вектор-столбец задаваемых параметров наблюдения (регрессии) размерности 1×n;
- вектор-столбец задаваемых параметров наблюдения (регрессии) размерности 1×n;
L - скалярный параметрический регулятор;
σ(t, x, z) - скалярная функция активации (ФА) однослойного персептрона, получаемая нелинейным преобразованием j-го управления u и j-го наблюдения z.
Структура однослойной нейронной сети, параметрически адаптированной под j-й ТМ, представлена на рис. 1.

Рис. 1. Структура однослойной нейронной сети, параметрически адаптированной под j-й ТМ
На рис. 1 сплошными линиями обозначена структура однослойной НС с нелинейностью в «прямой цепи» (прототип - структура адаптивного регулятора (рис. 16, а) работы [5, с. 351]). Предлагаемая структура отличается от традиционной схемы адаптивного регулятора (АР) наличием НБП и положительной жесткой обратной связью по скалярному выходу . Данная структура НС добавлена пунктирной линией и сумматором - «цепью внутренней обратной связи» по скалярному входу (прототип - структура адаптивного регулятора (рис. 16, б) работы [5, с. 351]), которой соответствуют модифицированные уравнения (1) j-го ТМ
 (1*)
(1*)
Дифференциальные уравнения (1*) описывают широкий класс объектов с неопределенностью и позволяют обособить разрывные системы управления в новый класс интеллектуальных систем ассоциативной адаптации [3].
ФА определяет архитектуру НС. Однозначных рекомендаций по выбору ФА в настоящее время не существует. В режиме обучения of-line наиболее эффективен алгоритм обратного распространения ошибки сигнала и следующие ФА: гиперболическая тангенциальная, линейная и логическая сигмоидальная функции активации [6, 9].
В режиме on-line (оперативное обучение и управление), когда НС работает в реальном времени и выполняет функции адаптивного регулятора, будем полагать, что ФА удовлетворяет условиям [1]
 (4)
(4)
где  ,
,  ,
,  ,
,  ,
,  ;
;  - корректируемые на интервалах наблюдения нечеткие коэффициенты, определяющие перераспределение сигналов от входа к выходу и от выхода к входу (режим работы НС); α, β - весовые коэффициенты соответствующей физической размерности (ед.) при переменных в правой части ограничений на σ.
- корректируемые на интервалах наблюдения нечеткие коэффициенты, определяющие перераспределение сигналов от входа к выходу и от выхода к входу (режим работы НС); α, β - весовые коэффициенты соответствующей физической размерности (ед.) при переменных в правой части ограничений на σ.
Замечание 1. ФА для простоты анализа считаем безынерционной функцией, то есть принимаем  . Она не непрерывна по u и z, имеет разрывы: u = 0, z = 0. Будем считать их изолированными, а ФА в точках разрыва - стационарной:
. Она не непрерывна по u и z, имеет разрывы: u = 0, z = 0. Будем считать их изолированными, а ФА в точках разрыва - стационарной:  . Решения уравнений (1) в точках разрыва в обычном смысле может не существовать, и под словом «решение» понимается обобщенное решение по А.Ф. Филиппову [5].
. Решения уравнений (1) в точках разрыва в обычном смысле может не существовать, и под словом «решение» понимается обобщенное решение по А.Ф. Филиппову [5].
НБП Bs для j-го ТМ в теории НС и нечетких множеств называется однослойным персептроном с нулевым смещением или фаззификатором, вектор-строка cT - регрессором или дефаззификатором [7]. НБП B(u + σ) (формула (1*)) определяет однослойный персептрон с ненулевым смещением.
При адаптивном подходе считается, что существует устойчивая внутренняя структура физического объекта [5], но неизвестны его параметры (коэффициенты матрицы A). В описании j-го ТМ присутствует и отделима линейная часть с передаточной функцией W(p) (объект) и нелинейность с характеристикой σ(⋅). Поэтому коэффициенты передаточной функции W(p) неизвестны, а относительно нелинейности указаны частичные свойства характеристики σ(⋅). Кроме того, неизвестен вектор B настраиваемых весовых коэффициентов однослойного персептрона.
Требуется осуществить оперативное управление j-м ТМ с помощью адаптивного параметрического нейрорегулятора L.
В основу предлагаемого подхода положена параллель со схемой адаптивного управления с самонастройкой: НС настраивает параметры управления, задающие работу обычного контроллера, таким образом, чтобы выходной сигнал j-го ТМ поддерживался как можно ближе к желаемому: . Такое управление j-м ТМ называется стабилизирующим [5].
Задача синтеза адаптивного параметрического нейрорегулятора решается в три этапа:
1) исследуется выбранный класс нелинейных систем на устойчивость;
2) синтезируется стабилизирующее управление u, обеспечивающее цель адаптации:  ;
;
3) по условиям устойчивости инициализируются параметры НС.
2. Устойчивость системы
Устойчивость рассматривается как свойство свободного движения системы (1) после начального отклонения ее, вызванного какими-либо причинами. Невозмущенное движение  определяется нулевым решением системы (1).
определяется нулевым решением системы (1).
Аналитическое определение понятия устойчивости по Ляпунову формулируется следующим образом [4].
Определение 1. Нулевое решение системы (1) устойчиво, если при заданном сколь угодно малом ε >0 существует такое δ > 0, зависящее от ε, что при начальных условиях  , для решения на интервале 0 < t < ∞ выполняется условие
, для решения на интервале 0 < t < ∞ выполняется условие  .
.
Если условия определения 1 соблюдены и выполняется условие  , то нулевое решение системы (1) асимптотически устойчиво. Если условие выполняется для любых начальных условий x(0), то нулевое решение системы (1) устойчиво в целом. Асимптотическую устойчивость нулевого решения системы (1) в целом при любом характере нелинейности внутри определенного класса определяет понятие абсолютной устойчивости. На выполнение условия на интервале 0 < t < ∞ налагаются дополнительные требования к характеру переходных процессов внутри трубки : колебательность, экспоненциальность и др. Будем считать эти процессы экспоненциальными.
, то нулевое решение системы (1) асимптотически устойчиво. Если условие выполняется для любых начальных условий x(0), то нулевое решение системы (1) устойчиво в целом. Асимптотическую устойчивость нулевого решения системы (1) в целом при любом характере нелинейности внутри определенного класса определяет понятие абсолютной устойчивости. На выполнение условия на интервале 0 < t < ∞ налагаются дополнительные требования к характеру переходных процессов внутри трубки : колебательность, экспоненциальность и др. Будем считать эти процессы экспоненциальными.
Определение 2. Нулевое решение системы (1) экспоненциально устойчиво в классе нелинейностей (4), если найдутся константы C и ε > 0, такие, что

при определенных начальных условиях x(0),  - эвклидова норма (длина) вектора (⋅).
- эвклидова норма (длина) вектора (⋅).
Определение 3. Нулевое решение системы (1) абсолютно экспоненциально устойчиво в классе нелинейностей (4), если найдутся не зависящие от конкретного вида функции s константы C и ε > 0, такие, что
для любых начальных условий x(0), - эвклидова норма (длина) вектора (⋅).
По аналогии с работой [1] выдвинем следующие гипотезы.
Гипотеза 1. Для абсолютной устойчивости нулевого решения системы (1)-(3) в классе нелинейностей (4) необходимо и достаточно, чтобы эта система была асимптотически устойчива при

для любых , , , .
Гипотеза 2. Для достижения цели адаптации дифференциальной системы (1) необходимо и достаточно, чтобы ее нулевое решение было устойчиво в классе нелинейностей (4).
Нетрудно видеть, что устойчивость в целом системы (1) предполагает достижение цели адаптации и наоборот. Допущение позволяет говорить об абсолютной, а не об асимптотической устойчивости нулевого решения системы (1).
В работе [2] показано, что гипотезам, близким к сформулированным, удовлетворяет система любого порядка, если ее импульсная функция положительна. Тогда задача данного класса абсолютно устойчивых систем сводится к определению эффективных критериев положительности таких функций.
Передаточная функция (ПФ) линейной части системы (1)-(3) от входа σ к выходу z (см. рис. 1) равна

Здесь I - единичная матрица размера n×n;
 - полиномы для определения полюсов и нулей ПФ W(p).
- полиномы для определения полюсов и нулей ПФ W(p).
Обозначим через p1, ..., pn корни характеристического полинома P(p) (полюса ПФ), а через g(t) - импульсную (весовую) функцию
 (5)
(5)
Теорема 1. Если при неотрицательной импульсной функции (g(t) ≥ 0 при t ≥ 0) нулевое решение системы (1)-(3) устойчиво в целом, то для достижения цели адаптации необходимо и достаточно выполнение одного из двух условий в классе нелинейностей (4):
а) матрица A должна быть гурвицевой ( );
);
б) нулевое решение должно быть устойчивым
или
 (6)
(6)
Доказательство теоремы. Необходимость условий теоремы показана выше. Докажем теперь достаточность этих условий.
Решение системы (1) запишем в интегральной форме Коши

Отсюда следует, что доступный наблюдению сигнал равен

В последней формуле обозначены:  - реакция системы (1)-(3) на начальные условия x(0);
- реакция системы (1)-(3) на начальные условия x(0);
 (7)
(7)
- импульсная (весовая) функция системы (1)-(3).
ФА δ(⋅) выписывается с учетом правой части ограничений (4)

, . (8)
Тогда, учитывая неотрицательность импульсной функции и неравенства (4), имеем:

По свойству интегрального оператора в заданном классе функций [2] можно утверждать, что  , где Z(t) - решение уравнения
, где Z(t) - решение уравнения

Применим преобразование Лапласа для функций Z(t),  соответственно
соответственно

или
 (9)
(9)
В операторном уравнении (9) зависимость наблюдения от параметров линейной части и управления системы (1)-(3) в общем случае довольно сложная. Однако формула (9) существенно упростится, если принять во внимание уравнение регулятора (3)
 (10)
(10)
Переходя в формуле (10) от изображений к оригиналам функций z(t), ψ0(t) с учетом выражения для импульсной функции (7), получим:
 (11)
(11)
Из сравнения формул (2) и (11) находим аналитическое выражение для вектора состояния j-го ТМ
 (12)
(12)
Анализ решения (12) системы (1) - (3) показывает, что достижение цели адаптации достигается, если выполняются условия а) или б) теоремы. Теорема доказана.
Теорема 2. Если при неотрицательной импульсной функции (g(t) ≥ 0 при t ≥ 0) матрица  гурвицева и корни характеристического полинома управления имеют особенности в левой полуплоскости, то нулевое решение уравнений (1*), (2), (3) абсолютно экспоненциально устойчиво в классе нелинейностей (4). И, наоборот, если g(t) ≥ 0 при t ≥ 0, нулевое решение уравнений (1*), (2), (3) экспоненциально устойчиво, то матрица A гурвицева, если гурвицев полином U(p) управления u.
гурвицева и корни характеристического полинома управления имеют особенности в левой полуплоскости, то нулевое решение уравнений (1*), (2), (3) абсолютно экспоненциально устойчиво в классе нелинейностей (4). И, наоборот, если g(t) ≥ 0 при t ≥ 0, нулевое решение уравнений (1*), (2), (3) экспоненциально устойчиво, то матрица A гурвицева, если гурвицев полином U(p) управления u.
Доказательство теоремы 2. Решение уравнений (1*) в интегральной форме Коши имеет вид

Тогда выходной сигнал z равен

Аналогично доказательству теоремы 1, учитывая неотрицательность импульсной функции и неравенства (4), получим:
 (13)
(13)
Решение уравнения, представленного правой частью неравенства (13), записывается в виде
 (14)
(14)
Через преобразование Лапласа для функций Z(t), получим:

Последняя формула с учетом уравнения регулятора (3) принимает вид
 (15)
(15)
Переходя от изображений к оригиналам функций в формуле (15), имеем:

Интеграл по контуру Г1 идентичен интегралу по контуру Г в теореме [2], где доказано, что особенности изображения свободной составляющей решения - реакции системы (1*), (2), (3) на начальные условия ψ0(p) и передаточной функции  лежат в левой полуплоскости.
лежат в левой полуплоскости.
Покажем теперь, что интеграл по контуру Г2 оставляет слева все особенности подынтегральной функции, а полином P(p) - LQ(p) соответствует замкнутой параметрическим регулятором L системе (1*).
Для этого убедимся, что

где  - гурвицева матрица системы (1*), замкнутой традиционным АР, I - единичная матрица размера n×n.
- гурвицева матрица системы (1*), замкнутой традиционным АР, I - единичная матрица размера n×n.
Воспользуемся известным из теории матриц [5] тождеством
 (16)
(16)
которое справедливо при 
При указанных p сходится ряд
 (17)
(17)
Из формул (16), (17) имеем:
 (18)
(18)
Из выражения (18) выпишем передаточную функцию k + 1 члена ряда
 (19)
(19)
Тогда из формул (18), (19) следует:
 (20)
(20)
что и требовалось показать.
Так как A* - гурвицева матрица, то и полином P(p) - LQ(p) замкнутой параметрическим регулятором L системы (1*) гурвицев.
Таким образом, для того чтобы ФА u + σ(t, z, u) доставляла асимптотическую устойчивость системе (1*), достаточно, чтобы полином U(p) управления u в классе нелинейностей (4) был гурвицевым. Теорема доказана.
Следствие теоремы 2. Для достижения цели адаптации в системе (1*), (2), (3) необходимо и достаточно выполнение одного из двух условий в классе нелинейностей u + σ(t, z, u):
а) матрица  должна быть гурвицевой;
должна быть гурвицевой;
б) условие устойчивости нулевого решения должно совпадать с условием устойчивости нулевого решения уравнений (1)-(3) теоремы 1.
Действительно, из сравнения формул (10), (15), (20) можно заключить, что при переходе к оригиналам в выражении (15) аналитическое решение системы (1*), (2), (3) при ограничениях вида (4) имеет вид
 (21)
(21)
3. Настройка нейронной сети по функции активации
Для синтеза стабилизирующего управления в режиме on-line наибольший интерес представляет выполнение условия б) теоремы 1 или следствия теоремы 2 - условия устойчивости нулевого решения, поскольку условие гурвицевости матриц A или известной структуры, но с неизвестными коэффициентами, вносит параметрическую неопределенность в решение задачи построения нейронного регулятора. В режиме of-line условие а) разрешимо, но с привлечением дополнительных, достаточно трудоемких в вычислительном плане процедур параметрической идентификации или робастной стабилизации, построенных на основе матричных уравнений или неравенств Ляпунова [5].
Поэтому более подробно выясним, какой физический смысл имеют задаваемая формулой (8) функция активации и условие б) теоремы.
Нетрудно заметить, что ФА (8) содержит два слагаемых: первое слагаемое соответствует обратному (инверсному) распространению сигнала, второе слагаемое - его прямому распространению.
Так как наблюдение z и управление u в архитектуре встроенной в обычный адаптивный регулятор однослойной НС - скалярные функции, а особые точки считаются изолированными, то ФА (8) для j-го ТМ равна
, . (22)
Зависимость σ(⋅) = σ(L) при фиксированных  представлена на рис. 2.
представлена на рис. 2.
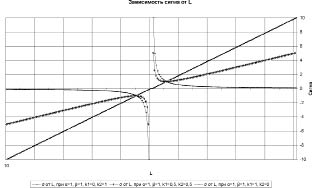
Рис. 2. Зависимость функции активации от значений регулируемого параметра при различных  и α = 1 (ед.), β = 1 (ед.)
и α = 1 (ед.), β = 1 (ед.)
В задачах управления параметр  рекомендуется связывать с интервалом наблюдения выходного сигнала z, который разбивается на s периодов дискретизации T0:
рекомендуется связывать с интервалом наблюдения выходного сигнала z, который разбивается на s периодов дискретизации T0:  . В каждый период дискретизации выполняется несколько обучающих итераций. В самом простом случае можно принять период дискретизации равным периоду корректировки обучающей итерации: T0 = TL и связать при t0 = 0 период наблюдения выходного сигнала с реальным временем:
. В каждый период дискретизации выполняется несколько обучающих итераций. В самом простом случае можно принять период дискретизации равным периоду корректировки обучающей итерации: T0 = TL и связать при t0 = 0 период наблюдения выходного сигнала с реальным временем:

Простой анализ выражений (8), (22) показывает, что нейронная сеть функционирует в трех режимах:
А. Если  , то выполняется инициализация параметров НС; сеть предварительно обучается (
, то выполняется инициализация параметров НС; сеть предварительно обучается ( ) по алгоритму обратного распространения ошибки сигнала (в нашем случае сигнала z (z* = 0).
) по алгоритму обратного распространения ошибки сигнала (в нашем случае сигнала z (z* = 0).
Б. Если параметр  , то в реальном времени происходит дальнейшее обучение нейронной сети и одновременно нейро-нечеткое управление параметрически неопределенного физического объекта известной структуры
, то в реальном времени происходит дальнейшее обучение нейронной сети и одновременно нейро-нечеткое управление параметрически неопределенного физического объекта известной структуры
(см. рис. 1).
В. Если параметр  , то процесс обучения сети заканчивается, и НС работает как обычный адаптивный регулятор (
, то процесс обучения сети заканчивается, и НС работает как обычный адаптивный регулятор ( ).
).
Условия А-В представляют собой систему продукционных правил (продукций) и реализуются в блоке принятия решений децентрализованного управления технологической системой с нечеткой структурой взаимосвязей [3].
4. Параметрический синтез стабилизирующего управления методом скоростного градиента
Подстройка НС под эталонную модель (желаемый выходной сигнал) j-го ТМ может осуществляться различными градиентными методами: аналитического конструирования, обратных задач динамики, синергетической теории управления, теории инвариантности, традиционного адаптивного управления. В качестве эффективного алгоритма обратного распространения в статье предлагается использовать метод скоростного градиента (МСГ) [3].
Замечание 2. МСГ был предложен А.А. Красовским [5]. Доказательство общих схем алгоритмов управления по МСГ выполнено А.Л. Фрадковым[8]. МСГ, по существу, является градиентным методом наискорейшего спуска в пространстве параметров.
Формулировка задачи синтеза стабилизирующего управления по МСГ сводится к следующему.
Состояние j-го ТМ -  , управление u - скалярное, наблюдается скалярная величина
, управление u - скалярное, наблюдается скалярная величина  . Эволюцию j-го ТМ описывает дифференциальная система (1*), где измеряемая кусочно-дифференцируемая функция σ(t, z, u) является аддитивной добавкой к скалярному управлению u и подчинена ограничению вида (4), B - постоянный n-вектор настраиваемых входных параметров. Управление линейно зависит от наблюдаемой величины: u = Lz.
. Эволюцию j-го ТМ описывает дифференциальная система (1*), где измеряемая кусочно-дифференцируемая функция σ(t, z, u) является аддитивной добавкой к скалярному управлению u и подчинена ограничению вида (4), B - постоянный n-вектор настраиваемых входных параметров. Управление линейно зависит от наблюдаемой величины: u = Lz.
Матрица A и вектор B заранее неизвестны. Вектор c, учитывающий «вклады» переменных состояния x в наблюдение z, задается.
Требуется синтезировать параметрический регулятор L = L(t).
Цель управления - выполнение условия - соответствует минимизации в пределе локального функционала  , где H - положительно определенная, симметрическая матрица размерности n×n.
, где H - положительно определенная, симметрическая матрица размерности n×n.
Для синтеза нелинейного параметрического регулятора применим схему МСГ в дифференциальной форме [8].
Для этого определим полную производную от локального функционала

и вычислим градиент по параметру L

По схеме МСГ синтезируемый в дифференциальной форме нелинейный скалярный регулятор имеет вид:
 (23)
(23)
Для системы (1*), (2), (3) при ограничениях на ФА типа (4) алгоритм адаптации (обучения) j-го ТМ записывается в виде
 (24)
(24)
где γ > 0 - положительное число, определяющее скорость убывания градиента по параметру L.
По постановке задачи процедура управления должна зависеть только от наблюдаемой величины z (см. рис. 1). Поэтому в (24) потребуем соблюдения равенства
HB = c. (25)
Тогда с учетом того, что  , в окончательном виде получим алгоритм адаптации j-го ТМ
, в окончательном виде получим алгоритм адаптации j-го ТМ
 (26)
(26)
где , - параметры, определяющие режим работы НС.
5. Инициализация начальных условий
Реализация условия устойчивости нулевого решения уравнений j-го ТМ (условие б) теоремы 1 или следствия теоремы 2) для достижения цели адаптации  сводится к инициализации начальных условий алгоритма адаптации (26).
сводится к инициализации начальных условий алгоритма адаптации (26).
Воспользуемся равенством (25). Матрицу H в локальном функционале J и в формуле (25) рекомендуется выбирать таким образом, чтобы выполнялось неравенство [5, с. 331]
 (27)
(27)
где  - задаваемая при некотором c = c* , желаемая гурвицева матрица замкнутой регулятором L системы (1*), (2), (3). Матрица A* может быть предварительно идентифицирована (эмулирована в НС) по экспериментальным данным вход-выходных характеристик замкнутого линейным регулятором физического объекта.
- задаваемая при некотором c = c* , желаемая гурвицева матрица замкнутой регулятором L системы (1*), (2), (3). Матрица A* может быть предварительно идентифицирована (эмулирована в НС) по экспериментальным данным вход-выходных характеристик замкнутого линейным регулятором физического объекта.
Неравенство (27) соответствует второй лемме Ляпунова об устойчивости движения и указывает класс технических систем, который алгоритмом адаптации приводится к цели. Этот класс полностью определяется через параметры алгоритма.
Инициализация начальных условий алгоритма адаптации (26) сводится к следующему.
1. Используя пакет Mat Lab Toolbox LMI, методом линейного программирования решаем систему матричных неравенств Ляпунова (27) и определяем матрицу H.
2. Задаваясь весами c = c* выходных сигналов  , из формулы (25) вычисляем параметры вектора B НБП:
, из формулы (25) вычисляем параметры вектора B НБП:  .
.
3. Применяя условие устойчивости б) теоремы 1, определяем начальное условие L(0) алгоритма адаптации (26)  :
:
В последующем начальные условия алгоритма адаптации (26) уточняются в реальном времени с шагом, равным периоду дискретизации (интервалу наблюдения) выходного сигнала z.
Альтернативный путь предварительной инициализации параметров НС по алгоритму обратного распространения - использование пакета Neural Toolbox среды Mat Lab.
Дальнейшее оперативное обучение и управление j-м ТМ производится по алгоритму адаптации (26)  . При
. При  процесс обучения НС заканчивается и НС работает как обычный АР.
процесс обучения НС заканчивается и НС работает как обычный АР.
Заключение
Таким образом, в статье на основе организации параметрического управления по методу скоростного градиента разработан эффективный алгоритм адаптации, позволяющий:
1) ускорить сходимость нейро-нечеткого управления за счет обучения нейронной сети в реальном времени;
2) применить гибридные сети, в которых искусственные нейронные сети связываются со структурами адаптивного управления на основе традиционных технологий;
3) осуществить предварительное обучение и применить эффективные процедуры инициализации параметров нейронной сети.
Для практической реализации алгоритма адаптации на базе однослойной нейронной сети достаточно знаний о порядке дифференциальных уравнений, описывающих физический объект с устойчивой структурой взаимосвязей между ее элементами.
Список литературы
-
Айзерман М.А. О сходимости процесса регулирования после больших начальных отклонений // А и Т. - 1946. - № 2-3. - С. 148-167.
-
Гиль М.И. Об одном классе абсолютно устойчивых систем // А и Т. - 1983. - № 10. - С. 27-36.
-
Пашков Н.Н., Мухопад Ю.Ф., Пунсык-Намжилов Д.Ц. Ассоциативный автомат децентрализованного адаптивного управления системой автономных вычислительных процессов // Научный вестник НГТУ. - Новосибирск: НГТУ, 2009. - № 2 (35). - С. 201-206.
-
Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. - М.: Наука, 1988. - 256 с.
-
Срагович В.Г Адаптивное управление. - М.: Наука, 1981. - 384 с.
-
Управление в условиях неопределенности / под ред. проф. А.Е. Городецкого. - СПб.: Изд-во СПб ГТУ, 2002. - 398 с.
-
Терехов В.А., Ефимов Д.В., Тюкин И.Ю. Нейросетевые системы управления // Нейроконтроллеры и их применение / под ред. А.И. Галушкина. - М.: ИПРЖР, 2002. - 480 с.
-
Фрадков А.Л. Схема скоростного градиента и ее применение в задачах адаптивного управления // А и Т. - 1979. - № 9. - С. 90-101.
-
Омату С., Халид М., Юсоф Р. Нейроуправление и его приложения. Кн. 2 // Нейроконтроллеры и их применение / под ред. А.И. Галушкина, В.А. Птичкина. - М.: ИПРЖР, 2000. - 272 с.
-
Hunt K.J., Sbarbaro D., Zbikowski R., Gawthrop P.J. Neural Network for Control Systems - a Survey // Automatica. - 1992. - Vol. 28. - P. 1083-1112.
Рецензенты:
Данеев А.В., д.т.н., профессор, ФГОУ ВПО «Восточно-Сибирский институт МВД России», г. Иркутск;
Дунаев М.П., д.т.н., профессор, Иркутский государственный технический университет, г. Иркутск.
Библиографическая ссылка
Мухопад Ю.Ф., Пашков Н.Н., Сизых В.Н. АДАПТИВНЫЙ ПОДХОД К НЕЙРОННОМУ УПРАВЛЕНИЮ ОДНИМ КЛАССОМ АБСОЛЮТНО УСТОЙЧИВЫХ СИСТЕМ // Фундаментальные исследования. – 2011. – № 8-1. – С. 139-147;URL: https://fundamental-research.ru/ru/article/view?id=26802 (дата обращения: 17.04.2024).