



Травмы суставов как верхних, так и нижних конечностей в большинстве случаев приводят к ограничению движений в них. Для лечения этой патологии используется метод иммобилизации конечности с помощью гипса или другого внешнего фиксатора, что неизбежно ведет к ограничению подвижности в суставе и атрофии мышц. Поэтому реабилитация после травмы даже при идеальном первичном лечении необходима для максимального ускорения восстановления. Эту задачу позволяют решать механотерапевтические аппараты, с помощью которых осуществляется разработка суставов и восстановление связочно-мышечного аппарата [1, 4, 6, 7, 8, 9, 10].
Реабилитация конечностей или суставов решает две основные проблемы: восстановление полного объема движений в суставе и наращивание мышечной силы и массы; восстановление правильного стереотипа движений [2, 5].
В настоящее время наибольшее распространение получили двухзвенные системы с одним активным шарниром. Такие устройства имеют ограниченные функциональные возможности, с целью их расширения появились трехзвенные конструкции аппаратов с несколькими активными шарнирами. Трехзвенная система может иметь пассивный коленный шарнир, а голеностопный шарнир – перемещаться поступательно.
Обычно такие устройства представляют собой системы для пассивной реабилитации, действия которых направлены на сгибание и разгибание сустава в пределах заданного угла. При этом недостаточное внимание уделяется разработке и исследованию аппаратов, воздействующих на нужные группы мышц в определенные фазы движения сустава, тем самым навязывается правильный стереотип ходьбы и тренируются мышцы, необходимые для правильной походки. В данной статье рассматривается исследование заданного движения трехзвенного механизма с активными тазобедренным, коленным и голеностопным суставами, работа которого осуществляется в сопряжении с основными принципами движения нижней конечности человека. Применение таких активных элементов существенно повышает эффективность реабилитационных мероприятий.
Целью данного исследования является изучение закономерностей управляемого движения трехзвенного механизма с тремя активными шарнирами. Для достижения поставленной цели необходимо, используя математическую модель движения трехзвенника, получить результаты исследования, провести сравнительный анализ с экспериментальными данными.
Описание трехзвенного механизма
В работе рассматривается устройство для реабилитации нижних конечностей человека после травм, которое состоит из неподвижного основания 1, стола 2, штанг 3–5, соединенных между собой электроприводами вращательного движения 6–8, фиксаторов 9–13, которые фиксируют ногу человека, электропривода вращательного движения 14, для регулировки положения тела, червячного редуктора 15.
Устройство работает следующим образом: нога человека удерживается в механизме фиксаторами 9–13. Электроприводом 14 регулируется угол наклона тела пациента. Электроприводы 6–8 передают движение ноге пациента.
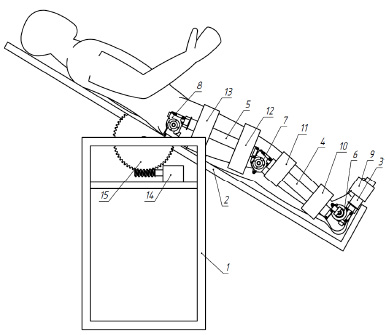
Рис. 1. Схема аппарата для реабилитации нижних конечностей человека после травм
Моделирование движения трехзвенного механизма
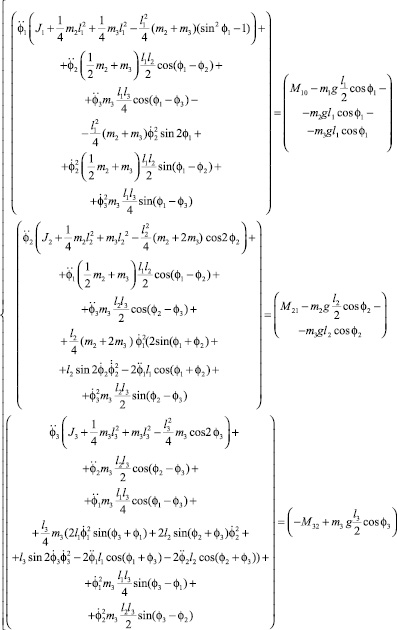
Для синтеза основных параметров реабилитационного аппарата крайне важно определить моменты, создаваемые электроприводами 6–8, обеспечивающих движение звеньев механизма по заданным траекториям. Будем использовать математическую модель, описанную следующей системой дифференциальных уравнений [10]:
Для решения поставленной задачи зададим законы изменения углов звеньев 1–3, положение которых определяется с помощью углов , φ2, φ3. Пусть эти углы изменяются по следующим законам: φi = kicos ωit, где k – амплитуда угла, подбирается в зависимости от диапазона его изменения, а ωi – частота вращения i-го звена.
Углы φ1 и φ2 звеньев 1 и 2 будем изменять в диапазоне  , а угол φ3 –
, а угол φ3 –  .
.
Для моделирования движения реабилитационного устройства будем использовать параметры экспериментального стенда для исследования движения трехзвенного реабилитационного аппарата, показанного на рис. 2. Экспериментальная установка состоит из следующих основных элементов: 1 – стойка, 2 – опорная поверхность, 3 – приводы, 4 – звенья механизма. Звенья экспериментального стенда изготовлены из пластика, массы звена 1 и звена 2 равны. Звенья связаны между собой приводами вращательного движения, которые представляют собой мотор-редукторы с червячной передачей. Весь механизм подвешен на металлическом каркасе.
а 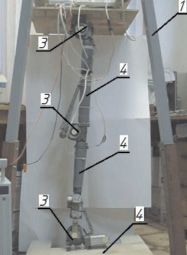 б
б 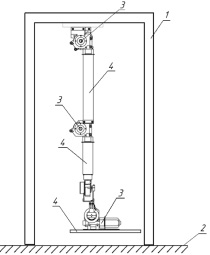
Рис. 2. Общий вид лабораторного стенда: а – фото; б – схема
Исходные параметры для моделирования: масса звена 1, m1 = 2 кг; масса звена 2, m2 = 2 кг; масса звена 3, m3 = 1,3 кг; длина звена 1, l1 = 0,43 м; длина звена 2, l2 = 0,43 м; длина звена 3, l3 = 0,14 м; угол наклона звена 1, φ1 = –π/2 рад; угол наклона звена 2, φ2 = –π/2 рад; угол наклона звена 3, φ3 = –π/2 рад; угол наклона системы координат относительно горизонта, ξ = 0.
Для получения временных зависимостей крутящих моментов зададим законы изменения углов звеньев. Положим, что 
 для интервала 0 ≤ t ≤ 0,7,
для интервала 0 ≤ t ≤ 0,7,  для интервала 0,7 ≤ t ≤ 1;
для интервала 0,7 ≤ t ≤ 1; 
Выбор такого движения трехзвенной системы обусловлен биомеханическими возможностями ноги человека и соответствует фазам движения человека [3]. Определим величину управляющих моментов в зависимости от величины массы звеньев механизма.
Получим графики изменения моментов звеньев во времени.
а  б
б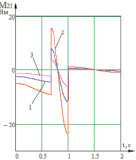 в
в
Рис. 3. Временные характеристики изменения управляющих моментов M10 звеньев механизма: 1 – при исходных значениях масс звеньев; 2 – при m1 = 4, m2 = 4, m3 = 2,6; 3 – при m1 = 1, m2 = 1, m3 = 0,65; а – диаграмма изменения момента M10; б – диаграмма изменения момента M21; в – диаграмма изменения момента M32
Исследуем другой режим работы трехзвенного механизма, при котором шарнир O3 движется поступательно. Такой принцип движения используется во многих существующих аппаратах для разработки суставов [1, 4]. Законы изменения углов звеньев:



Ниже приведены графики изменения моментов звеньев во времени.
а б
б в
в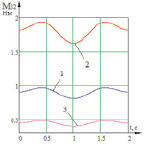
Рис. 4. Временные характеристики изменения управляющих моментов M10звеньев механизма: 1 – при исходных значениях масс звеньев; 2 – при m1 = 4, m2 = 4, m3 = 2,6; 3 – при m1 = 1, m2 = 1, m3 = 0,65; а – диаграмма изменения момента M10; б – диаграмма изменения момента M21; в – диаграмма изменения момента M32
Для первого режима работы диаграммы изменения моментов звеньев имеют немонотонный характер. Пиковые значения моментов возникают на интервале 0,7 ≤ t ≤ 1 с, в это время механизм испытывает особо сильные нагрузки. Для второго режима характерно плавное изменение характеристики – моменты имеют синусоидальный вид. При росте масс звеньев наблюдается тенденция к увеличению значений моментов.
В ходе экспериментальных исследований также были получены зависимости изменения управляющих моментов от времени для второго режима работы устройства (рис. 5).
а 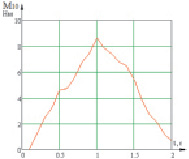 б
б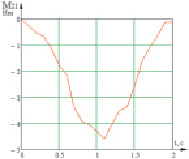 в
в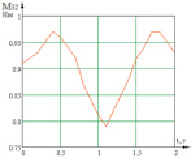
Рис. 5. Временные характеристики изменения управляющих моментов звеньев механизма, полученные экспериментальным путем: а – временные характеристики изменения управляющих моментов M10; б – временные характеристики изменения управляющих моментов M21; в – временные характеристики изменения управляющих моментов M32
Отклонение экспериментальных данных от значений, полученных в ходе математического моделирования, составляет в среднем 8–10 %.
Заключение
В работе предложена схема аппарата для реабилитации нижних конечностей человека, оснащенного тремя управляемыми электромеханическими приводами, движение которого имитирует движение ноги человека. Приведены расчетная схема и математическая модель, позволяющая исследовать управляемое движение устройства численным методом. В результате моделирования выявлены зависимости управляющих моментов от массы звеньев системы.
Рецензенты:
Савин Л.А., д.т.н., профессор, заведующий кафедрой «Мехатроника и МИ», ФГОУ ВПО «Госуниверситет УНПК», г. Орел;
Кобелев Н.С., д.т.н., профессор, заведующий кафедрой теплогазоснабжения и вентиляции, ЮЗГУ, г. Курск.
Работа поступила в редакцию 16.09.2013.Библиографическая ссылка
Яцун С.Ф., Локтионова О.Г., Понедельченко М.С. СИНТЕЗ ПАРАМЕТРОВ АППАРАТА ДЛЯ РЕАБИЛИТАЦИИ НИЖНИХ КОНЕЧНОСТЕЙ ЧЕЛОВЕКА ПОСЛЕ ТРАВМ // Фундаментальные исследования. – 2013. – № 10-5. – С. 1033-1039;URL: https://fundamental-research.ru/ru/article/view?id=32448 (дата обращения: 23.04.2024).