



Проблему идентификации объектов можно рассматривать как отдельное самостоятельное направление, так и как составную часть общей проблемы управления с целенаправленной взаимосвязью с другими задачами управления, включая задачи измерения, оценивания, регулирования, прогнозирования и другие. При таком подходе появляется целый ряд особенностей идентификации, связанных с функционированием объектов в составе систем управления. Эти особенности, а также требования, предъявляемые к результатам идентификации в системах управления, вносят соответствующие изменения в подходы, методы и алгоритмы идентификации.
Общая характеристика методов идентификации
Традиционная задача идентификации состоит в определении (или уточнении) структуры и параметров математической модели объекта по наблюдаемым данным о его входных и выходных величинах [2, 5]. При идентификации технологических объектов, как правило, требуется решение двух основных взаимосвязанных задач: получение информативных исходных данных и их обработка для получения надежных зависимостей или моделей.
Для получения информативных данных предлагается использовать так называемые пассивный и активный методы идентификации [6], при которых получение исходных данных для математического описания объекта имеет достаточно разнонаправленный характер. Так, например, идентификация объектов в замкнутых системах управления принципиально отличается от идентификации вне систем управления, на что указывается в ряде работ [1, 7]. Наличие прямых и обратных связей в действующих системах управления делает крайне затруднительным использование методов математической статистики, теории традиционной идентификации, а также других разделов общей теории систем. Несмотря на это, методы пассивного корреляционного или регрессионного анализа и близких по замыслу процедур, все же используются для идентификации промышленных объектов. При этом зачастую игнорируются предпосылки их применения. Аналогично дело обстоит с выполнением предпосылок других статистических методов при попытке их использования для математического описания действующих объектов управления, так как проведение экспериментов на промышленных объектах осуществляется в условиях тесного переплетения исследовательских целей с целями рабочего функционирования. В этих условиях необходима разработка новых методов взаимосогласованного рабочего и идентифицирующего управления. Следует отметить, что это достаточно перспективное направление для идентификации объектов в действующих системах управления.
В этом русле следует акцентировать внимание на сравнительно новом научно-прикладном направлении анализа и синтеза многоцелевых производственно-исследовательских систем управления, в рамках которого развиваются известные и предлагаются новые методы идентификации объектов в системах управления с натурно-модельными блоками [8]. При этом особого внимания заслуживает разработанный метод идентификации процессов с нанесением пробных воздействий на прогнозируемые программы рабочего управления, выработкой и реализацией компенсирующих пробных воздействий управления и вычитанием эффектов этих компенсирующих воздействий [1].
Реализация этого метода (рис. 1) заключается в нанесении испытательных воздействий ?u2 на прогнозируемые траектории  рабочего режима управления; компенсации их эффектов путем нанесения регулирующих воздействий
рабочего режима управления; компенсации их эффектов путем нанесения регулирующих воздействий  по уже изученным каналам, что позволяет обеспечить выполнение заданий y* на выходные воздействия объекта и не нарушать рабочего режима управления; расчетном исключении эффектов компенсирующих воздействий по формулам
по уже изученным каналам, что позволяет обеспечить выполнение заданий y* на выходные воздействия объекта и не нарушать рабочего режима управления; расчетном исключении эффектов компенсирующих воздействий по формулам

 (1)
(1)
где yp(t) – расчетное значение выходного воздействия объекта; y(t) – выходное воздействие объекта; Φj(t, θ) – оператор канала регулирования, полученный на предшествующих этапах идентификации; j – номер управляющего воздействия объекта,  ;
;  – величина компенсирующего воздействия; uj(t),
– величина компенсирующего воздействия; uj(t),  – измеренное и прогнозируемое значения управляющего воздействия.
– измеренное и прогнозируемое значения управляющего воздействия.
Неизвестные коэффициенты оператора исследуемого преобразующего канала оцениваются по разности δy2 между спрогнозированным yп и расчетным yр значениями выходного воздействия объекта и по разности δu2 между спрогнозированным  и фактически реализованным u2 испытательным входным воздействием.
и фактически реализованным u2 испытательным входным воздействием.
Примеры практического применения метода
Эффективность метода подтверждается полученными результатами идентификации промышленных объектов управления. В качестве объекта рассматриваются шахтные печи для металлизации окисленных окатышей, для которых получены диапазоны изменения оценок коэффициентов математических моделей преобразующих каналов. Структура модели для каждого из каналов принята, исходя из технологии металлизации окатышей и конструкции шахтной печи, в виде последовательного соединения интегрирующего звена с отсечкой и звена чистого запаздывания. Необходимые первичные данные сформированы путем нанесения специальных исследовательских воздействий на прогнозируемые траектории рабочего режима управления. Пример эксперимента представлен на рис. 2.
На первом этапе исследований осуществляли построение модели канала «изменение производительности печи – изменение степени металлизации окатышей». Следующий этап идентификации проводили уже с подавлением эффектов испытательных воздействий путем нанесения компенсирующих воздействий по тем каналам, математические модели которых уже известны. Обработка результатов экспериментов производилась как известными методами после получения всего переходного процесса, так и в динамике переходного процесса с привлечением модернизированных алгоритмов динамической идентификации [3]. Полученные диапазоны изменения оценок параметров моделей преобразующих каналов приведены в табл. 1, где k – коэффициент передачи; τ m,j – время запаздывания; θ m,j – время отсечки.
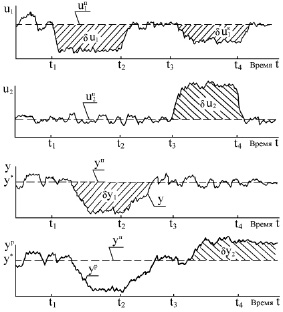
Рис. 1. Динамика воздействий при идентификации объекта
Таблица 1
Диапазоны изменения оценок параметров математических моделей преобразующих каналов
|
Входные величины Выходные величины |
Количество выгружаемых окатышей, т/ч |
Расход технологического газа, 1000 м3/ч |
Доля реметов в шихте, % |
Температура восстановительного газа, °С |
Содержание метана в восстановительном газе, % |
|
|
Степень металлизации окатышей, % |
k θ τ |
–0,66...–0,77 2,0...3,5 6,0...8,0 |
0,5...0,7 2,5...4,0 6,0...8,0 |
0,65...0,92 0,0...1,5 12,0...16,0 |
0,10–0,16 2,0–3,5 6,0–8,0 |
–1,2–0,0 2,0–3,5 6,0–8,0 |
|
Содержание углерода в окатышах, % |
k θ τ |
–0,08... –0,1 2,5...3,5 4,0...8,0 |
– – – |
0,05...0,09 0,0...1,5 12,0...16,0 |
–0,02...–0,03 3,0...3,5 6,0...8,0 |
0,17...0,34 2,0...3,5 6,0...8,0 |
Полученные динамические характеристики преобразующих каналов шахтной печи использованы при совершенствовании технологических инструкций по ведению процесса металлизации и при разработке алгоритмов прогнозирования и управления шахтной печью для металлизации окатышей.
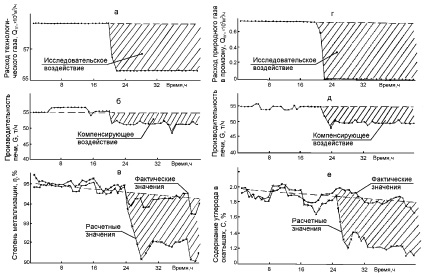
Рис. 2. Переходные процессы в системе управления шахтной печью № 1: а, г – исследовательские воздействия по расходу технологического газа и по расходу природного газа в промежуточную зону; б, д – компенсирующие воздействия по производительности шахтной печи; в, е – фактические и расчётные значения степени металлизации и содержания углерода в окатышах
Другим примером использования предложенного метода служит идентификация блока тепловых регенераторов кислородного производства [4], имеющего сложную структуру с запаздывающей положительной технологической обратной связью Qп (рециклом) и распределенными управляющими воздействиями Q1, Q2, Q3, с запаздываниями между циклами работы регенераторов в блоке, подверженный влиянию контролируемых Р и неконтролируемых возмущений с нестационарными свойствами. Особенность рассматриваемого класса объектов идентификации заключается в том, что изменение расхода газа прямого потока влияет на изменение температуры охлаждаемого газа в конце текущего периода работы, а изменение расхода газа петлевого потока – на изменение температуры в конце предстоящего периода работы.
Структура математической модели возмущенного движения такого класса объектов выбрана в виде
 (2)
(2)
 (3)
(3)
где  – рассчитанное по модели изменение температуры охлажденного воздуха в конце j-го рабочего периода, °C,
– рассчитанное по модели изменение температуры охлажденного воздуха в конце j-го рабочего периода, °C,  ; δw – изменение давления теплого воздуха, атм.; δuj – изменение расхода газа прямого потока, м3/мин; δuп – изменение расхода газа петлевого обратного потока, % хода регулирующего органа; δyj – изменение температуры охлажденного воздуха в конце j-го рабочего периода, °C; τ – время чистого запаздывания, мин; kj – коэффициент передачи канала регулирования «изменение расхода газа прямого потока ΔQ – изменение температуры охлажденного воздуха ?T», °С/(м3/мин); kпj – коэффициент передачи канала регулирования «изменение расхода газа петлевого потока ΔQп – изменение температуры охлажденного воздуха ΔT», °С/(% хода р.о.); kwj – коэффициент передачи канала преобразования внешних воздействий «изменение давления теплого воздуха ΔP – изменение температуры охлажденного воздуха ΔT», °С/атм.; kрj – коэффициент передачи канала рецикла «изменение температуры охлажденного воздуха в конце j-го рабочего периода ΔT – изменение расхода газа петлевого обратного потока ΔQп», (% хода р.о.)/°С.
; δw – изменение давления теплого воздуха, атм.; δuj – изменение расхода газа прямого потока, м3/мин; δuп – изменение расхода газа петлевого обратного потока, % хода регулирующего органа; δyj – изменение температуры охлажденного воздуха в конце j-го рабочего периода, °C; τ – время чистого запаздывания, мин; kj – коэффициент передачи канала регулирования «изменение расхода газа прямого потока ΔQ – изменение температуры охлажденного воздуха ?T», °С/(м3/мин); kпj – коэффициент передачи канала регулирования «изменение расхода газа петлевого потока ΔQп – изменение температуры охлажденного воздуха ΔT», °С/(% хода р.о.); kwj – коэффициент передачи канала преобразования внешних воздействий «изменение давления теплого воздуха ΔP – изменение температуры охлажденного воздуха ΔT», °С/атм.; kрj – коэффициент передачи канала рецикла «изменение температуры охлажденного воздуха в конце j-го рабочего периода ΔT – изменение расхода газа петлевого обратного потока ΔQп», (% хода р.о.)/°С.
Для нахождения неизвестных коэффициентов kj, kпj, kwj, kрj модели (2), (3) в качестве базового использовали предложенный метод идентификации, комбинируя его с методом идентификации объектов с рециклом [3] и методом идентификации объектов с распределенными управлениями [3]. При этом сначала идентифицировали каналы регулирования «ΔQ – ΔT». Располагая полученными на первом этапе динамическими характеристиками канала «ΔQ – ΔT», идентификацию характеристики «ΔQп – ΔT» проводили с компенсацией отклонений температуры охлажденного воздуха от желаемого (в данном случае прогнозируемого) значения. На рис. 3 представлена динамика основных переменных при идентификации канала «ΔQп – ΔT».

Рис. 3. Результаты идентификации канала «ΔQп – ΔT» при компенсации ΔT изменением прямого потока (для третьего регенератора): о----о – регистрируемые значения, о--- --о – прогнозируемые значения, о-- – --о – расчетные значения
В результате происходит отклонение температуры охлажденного воздуха от желаемого значения. Для подавления этих отклонений на четвертом цикле изменяется величина открытия заслонки прямого потока и отклонения температуры охлажденного воздуха уменьшаются. Для определения влияния пробного воздействия δп на выходные переменные необходимо исключить эффекты изменения Q, направленные на компенсацию эффекта δп. С этой целью отклонения регистрируемых значений Q от их прогнозируемых значений пересчитываются в изменения температуры охлажденного воздуха (площадь, заштрихованная в клеточку), которые и вычитаются из регистрируемой температуры охлажденного воздуха. Полученная расчетная кривая показывает, как бы изменилась температура охлажденного воздуха при отсутствии регулирующих воздействий расходом теплого воздуха прямого потока, а площадь, заштрихованная косой линией (включая и эффект изменения Q), представляет эффект пробного воздействия ?Qп. Расчетное исключение эффектов компенсирующих воздействий осуществляли по формулам типа (1). Подобным же образом проведена идентификация каналов регулирования «ΔQ – ΔT» и для двух других регенераторов при нанесении пробного воздействия положительной и отрицательной величины. Полученные значения коэффициентов передачи исследуемых каналов приведены в табл. 2.
Таблица 2
Коэффициенты передачи преобразующих каналов
|
Наименование канала |
Размерность коэффициентов передачи |
Оценки коэффициентов передачи по циклам |
||
|
1 |
2 |
3 |
||
|
ΔQп – ΔT |
°С/ % хода р.о. |
0,05 |
0,025 |
0,001 |
|
ΔQ – ΔT |
°С/(м3/мин) |
0,0015 |
0,00075 |
0,0003 |
|
ΔP – ΔT |
°С/атм. |
0,70 |
0,25 |
0,10 |
Полученные результаты идентификации использованы при разработке системы автоматического регулирования блока тепловых регенераторов.
Работа выполнена в рамках базовой части государственного задания Министерства образования и науки РФ на выполнение СибГИУ научно-исследовательской работы № 2555.
Рецензенты:
Цымбал В.П., д.т.н., профессор кафедры информационных технологий в металлургии, ФГБОУ ВПО «Сибирский государственный индустриальный университет», г. Новокузнецк;
Павлова Л.Д., д.т.н., доцент, директор института фундаментального образования, ФГБОУ ВПО «Сибирский государственный индустриальный университет», г. Новокузнецк.
Работа поступила в редакцию 10.10.2014.
Библиографическая ссылка
Мышляев Л.П., Львова Е.И., Ивушкин К.А., Тараборина Е.Н. ОСОБЕННОСТИ ТЕОРИИ И ПРАКТИКИ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ В СИСТЕМАХ УПРАВЛЕНИЯ // Фундаментальные исследования. – 2014. – № 11-3. – С. 519-524;URL: https://fundamental-research.ru/ru/article/view?id=35553 (дата обращения: 17.04.2024).