



В настоящее время оценка уровня накопленных усталостных повреждений при циклических деформациях проводится разрушающим методом по результатам усталостных испытаний образцов, вырезанных из реальных конструкций или модельных образцов. Однако вырезка образцов из реальных объектов приводит к нарушению целостности конструкции, а определение уровня накопленных усталостных повреждений на модельных образцах приводит к искажению результатов из-за неизбежных различий многочисленных факторов. Поэтому большое внимание уделяется определению уровня накопленных усталостных повреждений неразрушающими методами.
Разработан интроскоп и датчик для оценки поврежденного и напряженно деформированного состояния конструкций, основанный на измерении потерь на перемагничивание в металле [1–3]. Принцип действия интроскопа основан на том факте, что если ферромагнитный материал подвергается периодическому перемагничиванию, то в нем возникают потери энергии на гистерезис и вихревые токи [1].
Датчик потерь перемагничивания создает в контролируемом изделии переменное магнитное поле и представляет собой приставной электромагнит с двумя полюсами и двумя обмотками: возбуждения и измерительной. К обмотке возбуждения подводится переменное напряжение от генератора опорных частот, а напряжение измерительной обмотки обрабатывается амплитудным или фазовым методом [2, 3].
Для удобства ток возбуждения датчика автоматически поддерживается на заданном уровне, это позволяет считать сигнал в измерительной обмотке пропорциональным потерям на перемагничивание, которые зависят не только от наличия дефекта, но и от других факторов, влияющих на магнитные свойства материала [4].
В статье рассматриваются различные способы стабилизации тока намагничивания датчика потерь на перемагничивание. Независимо от конструктивного исполнения любой источник тока состоит из одних и тех же функциональных узлов (рис. 1). Это первичный источник питания, регулирующий элемент, датчик тока и нагрузка. В большинстве конструкций используется также цепь обратной связи, соединяющая датчик тока с регулирующим элементом. Ток в нагрузке устанавливается изменением параметров цепи обратной связи или датчика тока [5].
Если ток в цепи обратной связи достаточно мал, что обычно выполняется на практике, то через последовательно соединенные источники питания, датчик тока, регулирующий элемент и нагрузку протекает одинаковый ток. При этом условии практически любой вариант схемы получается перестановкой последовательно соединенных узлов и выбором точки заземления. Если же ток в цепи обратной связи соизмерим с током в основной цепи, необходимо учитывать появление погрешностей при установке нужного тока в нагрузке. Однако существуют схемные решения, в которых ток обратной связи протекает как через датчик тока, так и через нагрузку, что компенсирует возникновение ошибки.
В качестве регулирующего элемента в практических схемах обычно применяют одиночные или чаще составные транзисторы, в качестве датчика тока – резистор или диод. При выборе точки заземления также исходят из практических соображений.
Рассмотрим схемы, получаемые из общей функциональной схемы, показанной на рис. 1.
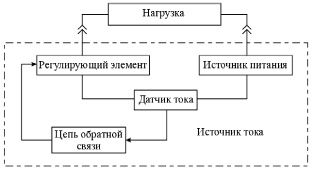
Рис. 1. Функциональная схема источника тока
Наиболее широко используемой схемой источника тока с применением операционного усилителя (ОУ) является классическая схема, приведенная на рис. 2 [5]. В этой схеме регулирующий элемент – транзистор VT1 – управляется ОУ DA1, который стремится уравнять напряжения на своих выводах – инвертирующем и неинвертирующем. При этом сила тока в нагрузке RH определяется выражением
 (1)
(1)
Для нормальной работы схемы напряжение на нагрузке UH не должно превышать значения, определяемого выражением
UН = IН; RН < UП – UКЭНАС – I·R1;
I ≈ IН, (2)
где UН – напряжение источника питания; UКЭНАС – напряжение насыщения транзистора VT1; R1 – сопротивление датчика тока R1.
В этой схеме ток в нагрузке IН отличается от тока I в датчике тока R1 на величину ошибки, определяемую силами токов в цепи обратной связи, а именно: тока базы IБ транзистора VT1 и входного тока IВХ ОУ DA1:
ΔI = IБ – IВХ. (3)
Очевидно, что величина ошибки установления требуемого тока в нагрузке тем меньше, чем меньше входной ток ОУ DA1 и чем больше коэффициент усиления транзистора VT1. По этой причине на практике в качестве регулирующего элемента обычно применяются составные транзисторы.
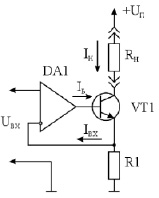
Рис. 2. Схема с использованием ОУ
Еще одним вариантом источника тока является схема с плавающей нагрузкой, приведенная на рис. 3. Так как нагрузка RH включена последовательно с датчиком тока R1, то на ошибку устанавливаемого тока не влияет ток базы транзистора VT1 и она определяется лишь очень малым входным током ОУ DA1:
ΔI = IВХ. (4)
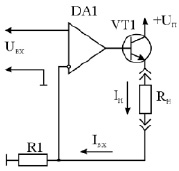
Рис. 3. Схема с плавающей нагрузкой
В качестве регулирующего элемента можно применить полевой транзистор. Это позволит уменьшить ошибку, связанную с входным током регулирующего элемента. Такая схема приведена на рис. 4. Ошибка установления значения тока нагрузки определяется входным током ОУ – выражением (3). Существенный недостаток данной схемы связан с тем, что крутизна полевого транзистора примерно на порядок ниже крутизны биполярного транзистора. Это вынуждает значительно увеличивать управляющее напряжение на затворе регулирующего элемента VT1, которое, как было показано выше, ограничено выходным напряжением ОУ DA1. Кроме того, применение полевого транзистора существенно уменьшает коэффициент передачи в цепи обратной связи и ухудшает в целом температурную стабильность источника тока, что приводит к увеличению ошибки устанавливаемой силы тока нагрузки.
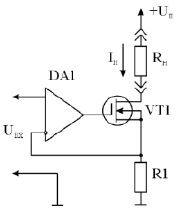
Рис. 4. Схема с полевым транзистором
Сравнив описанные выше схемы с применением ОУ и имея в виду применение ОУ с малыми входными токами, приходим к выводу, что наиболее точно силу тока в нагрузке можно получить в схеме на рис. 3. Во всех источниках тока, кроме схемы на рис. 2, имеются жесткие ограничения, накладываемые на величину напряжения на нагрузке, связанные с максимальным выходным напряжением ОУ. В схеме на рис. 2 можно получить любое требуемое напряжение на нагрузке путем соответствующего выбора напряжения питания нагрузки UП. При этом нужно учитывать лишь одно ограничение – максимально допустимое коллекторное напряжение транзистора VT1.
Во всех схемах источников тока с ОУ для обеспечения нормальной работы ОУ и для повышения точности установки выходного тока необходимо в качестве регулирующего элемента использовать супер-бета или составные транзисторы.
В ряде случаев требуется сформировать в нагрузке ток, переменный как по величине, так и по направлению. Для таких применений хорошо работает схема, приведенная на рис. 5. Эта схема, как и все предыдущие, может быть получена из общей функциональной схемы (рис. 1) при условии, что два одинаковых источника тока – один для тока положительной полярности, а другой для отрицательной – работают на общий датчик тока (резистор Rб) и общую нагрузку с комплексным сопротивлением ZH и имеют общую цепь обратной связи. В этой схеме выходной ток IН в точности повторяет форму входного напряжения UBX и определяется выражением
 (5)
(5)
При указанных на схеме номиналах источник тока преобразует входное напряжение от –10 до +10 В в ток от –10 до +10 мА. Для достижения высокой точности преобразования нужно использовать резисторы Rl-R6 с допуском не более 1 %. Недостатком приведенной схемы являются жесткие ограничения на величину выходного напряжения, связанные с максимальным выходным напряжением ОУ и определяемые неравенствами
UВХ + UН < UВЫХОУ ≈ UПОУ;
UВХ + UН < IН·Rб + IН·RН < UП – – UКЭНАС ≈ UП. (6)
При UПОУ = UП остается одно неравенство
UВХ + UН < UП. (7)
В этой схеме можно использовать практически любые ОУ с соответствующими цепями коррекции. Следует только учитывать, что более высокая точность преобразования напряжения в ток получается при использовании ОУ с малыми входными токами и малыми напряжениями смещения. В качестве регулирующих транзисторов VT1 и VT2 можно взять любые маломощные транзисторы с максимальным коллекторным напряжением более 30 В и током коллектора 20...150 мА.
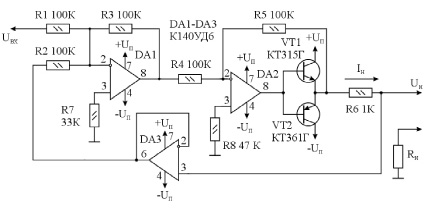
Рис. 5. Схема стабилизатора тока с переменным током в нагрузке
Результаты измерения тока возбуждения
|
Применяемая схема |
Ток возбуждения IB, мA |
|||
|
Напряжение генератора частоты UГ, В |
В воздухе |
На участке пластины без напряжений |
На напряженном участке пластины |
|
|
Без стабилизации |
1 |
2,6 |
1,82 |
1,89 |
|
Со стабилизацией |
1 |
1,10 |
1,09 |
1,09 |
В таблице приведены результаты измерения тока возбуждения датчика потерь перемагничивания без использования стабилизации тока возбуждения и со стабилизацией тока возбуждения. Как видно из таблицы, если стабилизатор не используется, то ток возбуждения изменяется, что обусловлено изменением магнитного сопротивления контролируемого изделия. При применении стабилизатора ток возбуждения практически не меняется. Примененный стабилизатор тока показал коэффициент стабилизации Кст = 67.
Стабилизатор по рис. 5 показал наилучшие результаты, поэтому наиболее приемлемой является схема стабилизатора тока с переменным током в нагрузке.
Библиографическая ссылка
Вильданов Р.Г., Фомичев С.С., Недоспасов К.В., Новоженин Е.В. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ВЕЛИЧИНОЙ ТОКА НАМАГНИЧИВАНИЯ В ДАТЧИКЕ ПОТЕРЬ НА ПЕРЕМАГНИЧИВАНИЕ // Фундаментальные исследования. – 2016. – № 3-2. – С. 240-244;URL: https://fundamental-research.ru/ru/article/view?id=40038 (дата обращения: 19.04.2024).