



Возникшая в середине 80-х годов прошлого века на стыке электроники, механики и оптики микросистемная техника остается одним из наиболее динамично развивающихся научно-технических направлений. Базовым классом компонентов микросистемной техники являются микроэлектромеханические системы (МЭМС) – устройства с интегрированными в объеме или на поверхности твердого тела электронными и микромеханическими структурами. Интеграция МЭМС с оптическими компонентами позволила выделить отдельный класс компонентов микросистем, названный микрооптикоэлектромеханическими системами. Основными элементами данных систем являются микроэлектромеханические преобразователи, включающие в себя электростатические приводы и емкостные преобразователи перемещений [1, 2].
При проектировании электростатических приводов и емкостных преобразователей перемещений микромеханических устройств необходимо учесть ряд эффектов, приводящих к возникновению неконтролируемого электростатического притяжения подвижных и неподвижных структур [3].
Постановка проблемы
Как следует из принципов работы микромеханических устройств [3, 4, 6], для корректной работы необходимо возвратно-поступательное или вращательное движение подвижных элементов. Однако, как видно на рис. 1, при подаче отклоняющих напряжений между неподвижными и подвижными электродами электромеханических преобразователей возникает объемное электрическое поле, приводящее к отклонению подвижных электродов не только вдоль оси Y, но и вдоль осей X и Z [7].
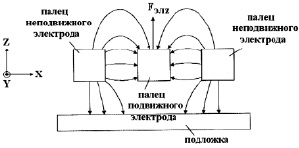
Рис. 1. Схема взаимодействия гребенчатых электродов электростатических приводов
Так как подвижные и неподвижные электроды электромеханических преобразователей изготавливаются в одном структурном слое, то можно выделить следующий вид технологической погрешности – дрейф зазора между пальцами гребенчатых структур [6]. Указанная технологическая погрешность приводит к возникновению колебаний подвижных элементов под действием результирующей электростатической силы вдоль оси Х, обусловленных растяжением/сжатием балок упругого подвеса подвижных электродов.
Как показано в работах [6, 7] амплитуда данных колебаний составляет единицы процентов от величины зазора между пальцами электродов и не вносит существенный вклад в возникновение неконтролируемого электростатического притяжения.
Кроме того, электрическое поле вдоль оси Х способно вызвать эффект неконтролируемого электростатического притяжения пальцев гребенок электродов электромеханических преобразователей при недостаточной их жесткости (рис. 2) [7].
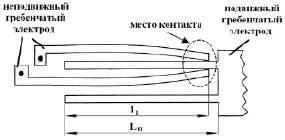
Рис. 2. Электростатическое притяжение подвижных и неподвижных электродов
Поэтому при расчете топологии электростатических приводов и емкостных преобразователей перемещений микромеханических устройств необходимо учитывать влияние данной составляющей электрического поля и ввести критерий оценки жесткости пальцев подвижных и неподвижных электродов электромеханических преобразователей.
Результаты моделирования
На основе выражений для оценки жесткости консольных балок и расчета электростатической силы, создаваемого планарными электростатическими приводами [5, 6], получен критерий оценки максимальной длины пальцев гребенок электродов электромеханических преобра-
зователей:
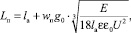
где wп – ширина пальцев гребенки электродов; lа – длина перекрытия пальцев гребенок электродов; g0 – расстояние между пальцами гребенок подвижных и неподвижных электродов; Е – модуль Юнга; ε – относительная диэлектрическая проницаемость воздушного зазора; ε0 – электрическая постоянная; U – напряжение.
На рис. 3–6 представлены зависимости максимальной длины пальцев гребенок электродов от длины их перекрытия и прикладываемого напряжения.
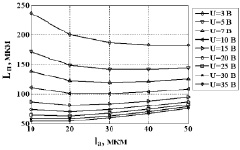
Рис. 3. Зависимость максимальной длины пальцев гребенок электродов от длины их перекрытия при wп = 1 мкм и g0 = 1 мкмв
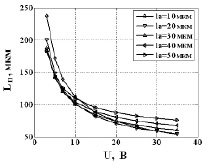
Рис. 4. Зависимость максимальной длины пальцев гребенок электродов от прикладываемого напряжения
при wп = 1 мкм и g0 = 1 мкм
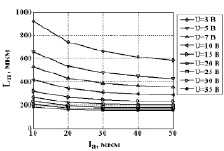
Рис. 5. Зависимость максимальной длины пальцев гребенок электродов от длины их перекрытия при wп = 2 мкм и g0 = 2 мкм
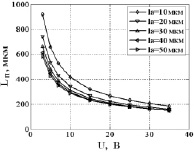
Рис. 6. Зависимость максимальной длины пальцев гребенок электродов от прикладываемого напряжения
при wп = 2 мкм и g0 = 2 мкм
Влиянием электрического поля вдоль оси Z, создаваемого электростатическими приводами, приводит к возникновению эффекта левитации подвижных структур микромеханических гироскопов и, следовательно, возникновению квадратурной ошибки. Для устранения данного эффекта подложка заземляется и получаемое асимметричное электрическое поле, действующее в верхней части электростатических приводов, неспособно вызвать колебания с амплитудой, существенно влияющей на квадратурную ошибку. Для устранения асимметричного электрического поля могут быть применены дополнительные неподвижные электроды, расположенные над гребенчатыми структурами подвижных и неподвижных
электродов [7].
Заключение
Так как все электромеханические преобразователи обратимы [3, 6], т.е. могут работать как электростатические приводы, так и как емкостные преобразователи перемещений, то при наступлении определенных условий последние начнут работать в качестве электростатических приводов. Критерии, позволяющие определить данные условия обратимости, могут быть получены из уравнений равновесия чувствительных элементов микромеханических устройств.
Предложенный критерий оценки максимальной длины пальцев гребенок подвижных и неподвижных электродов может использоваться при проектировании микромеханических устройств.
Работа выполнена при финансовой поддержке Министерства образования и науки Российской Федерации (Гос. соглашение № 14.А18.21.0126) в рамках ФЦП «Научные и научно-педагогические кадры инновационной России» на 2009–2013 годы.
Рецензенты:
Рындин Е.А., д.т.н., профессор, ведущий научный сотрудник ЮНЦ РАН;
Жорник А.И., д.ф.-м.н., профессор кафедры теоретической, общей физики и технологии ФГБОУ ВПО ТГПИ.
Работа поступила в редакцию 26.10.2012.
Библиографическая ссылка
Лысенко И.Е., Ежова О.А., Лысенко И.Е., Лашков А.В. КРИТЕРИЙ ОЦЕНКИ ЖЕСТКОСТИ ПАЛЬЦЕВ ГРЕБЕНОК ЭЛЕКТРОДОВ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ // Фундаментальные исследования. – 2012. – № 11-3. – С. 636-639;URL: https://fundamental-research.ru/ru/article/view?id=30587 (дата обращения: 20.04.2024).