



В настоящее время в мировом станкостроении активно развивается инновационное направление – станки с параллельной кинематикой, основанные на использовании рычажно-шарнирных механизмов параллельной структуры (МПС).
На сегодняшний день существует множество различных конструкций МПС, которые можно классифицировать по следующим компоновочным признакам: по виду штанг; по количеству штанг; по характеру расположения шарниров на платформе и основании и др. [1, 3, 5]. Система расположения в пространстве основных компонентов механизма образует индивидуальные компоновки.
Создание нового оборудования с МПС является сложной конструкторской задачей, при решении которой конструктор сталкивается с необходимостью перебора множества вариантов компоновочных решений МПС, таких как размещение шарниров на платформе и основании, увязка размеров элементов механизма и др.
При этом разработчик вынужден выполнять массу трудоемких расчетов, большую часть из которых возможно автоматизировать с помощью специализированных программных средств.
С целью уменьшения временных затрат при проектировании и анализе МПС авторами разработано программное обеспечение (ПО), позволяющее организовать работу пользователя путем предоставления ему выбора сценария проведения расчетов, перекрестной проверки корректности вводимых данных и вывода результатов расчета в удобной для пользователя форме.
Систематизация компоновочных схем МПС
На рис. 1 представлены некоторые из многообразия теоретически возможных исполнений механизмов с шестью штангами – гексаподов.
Представленные компоновочные схемы авторы условно разделили на две группы:
– симметричные (рис. 1, а–е), где все шарниры основания и платформы размещены равномерно (рис. 1, а) или пары шарниров расставлены так, чтобы выполнялось условие симметрии вращения (рис. 1, б–е);
– несимметричные (рис. 1, ж, з, и), где размещение шарниров не подчиняется определенному порядку.
Для механизма с меньшим количеством приводных штанг (от двух до пяти) существуют только два варианта компоновки: равномерная и несимметричная.
Благодаря такой систематизации существенно сокращается количество расчетов, выполняемых разработчиком вручную. Выбор схемы расположения штанг и шарниров на платформе и основании позволяет реализовать конкретный алгоритм задания исходных данных и расчета геометрических параметров механизма, заложенный в шаблоне, соответствующем данной компоновочной схеме.
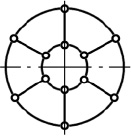
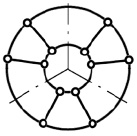
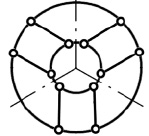
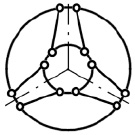
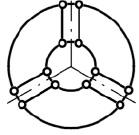
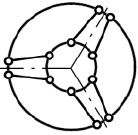
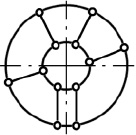
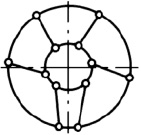
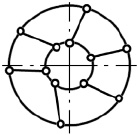
Рис. 1. Схемы МПС
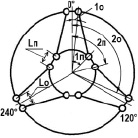
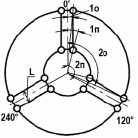
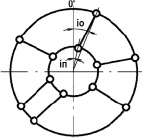
На рис. 2 представлены выделенные компоновочные схемы с индивидуальными наборами исходных данных для расчетов. Использование индивидуальных шаблонов позволяет задавать минимум исходных значений при проектировании. Например, для компоновочной схемы, показанной на рис. 2, б, можно задать расстояние между штангами на основании Lо, а все остальные параметры, указанные на рисунке, автоматически рассчитаются по заданному в шаблоне алгоритму. Иначе можно задать значение первого угла на основании 1о и тогда исходя из него все остальные параметры, указанные на рисунке, также будут рассчитаны автоматически. Аналогично рассчитываются углы на подвижной платформе. При этом в алгоритм заложены взаимные проверки корректности вводимых и рассчитываемых параметров на основании и подвижной платформе.
Для удобства каждой из представленных схем условно присвоено собственное название. Так, компоновочная схема, показанная на рис. 1, а, названа «равномерной». Схема на рис. 1, г названа «ферменной» за ее сходство с одноименной строительной конструкцией. Схема с параллельным расположением приводных штанг в каждой паре (рис. 1, д) названа «попарной».

Симметричное размещение штанг в механизме (рис. 1, а–е) может быть реализовано в бесконечном множестве вариантов. В качестве обобщающего примера симметричного расположения штанг была выбрана компоновочная схема, представленная на рис. 1, б, которую условно назвали «симметричной». При выборе в программе симметричной схемы могут быть реализованы все варианты симметричных структур компоновочных схем.
Схема, показанная на рис. 1, д, обобщает множество вариантов несимметричного расположения штанг и условно названа «асимметричной». С ее помощью могут быть реализованы все возможные компоновки, как симметричные, так и несимметричные. По сути, все остальные схемы являются частными случаями несимметричной.
Описание программного обеспечения
На рис. 3 представлена вкладка «Расчет» окна разработанного ПО. Она визуально разделена на три горизонтальных области.
1. Область «Расчет длин штанг» содержит переключатели для выбора компоновки штанг, поля ввода для задания радиуса основания, радиуса платформы, количества штанг и других параметров механизма, а также для задания размеров технологического рабочего пространства МПС.
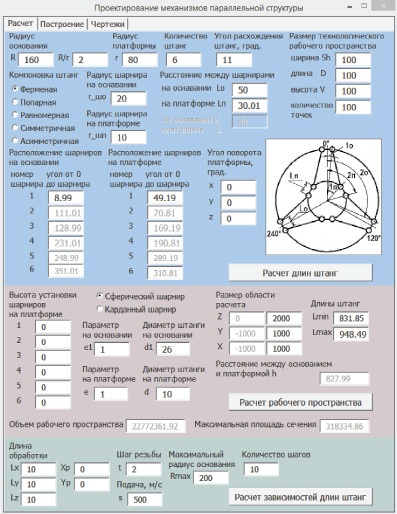
Рис. 3. Вкладка «Расчет» окна ПО
Технологическим рабочим пространством названа ограниченная область общего рабочего пространства МПС, в которой происходят все манипуляции рабочего органа, связанные с формообразованием обрабатываемой заготовки [2, 4].
2. Область «Расчет рабочего пространства» содержит переключатели для выбора типа шарнира, поля ввода для задания высоты установки шарниров на платформе, размера области расчета, длин штанг, параметра на основании, параметра на платформе, диаметра штанги на основании, диаметра штанги на платформе, поля для вывода расстояния между основанием и платформой, объема рабочего пространства, максимальной площади сечения.
3. Область «Расчет зависимостей длин штанг» содержит поля ввода для задания длины обработки, шага резьбы, подачи, максимального радиуса основания, количества шагов.
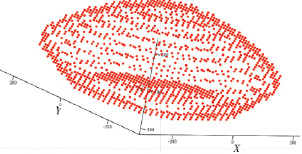
Рис. 4. Контур рабочего пространства
Во вкладке «Построение» производится построение области рабочего пространства, проектируемого МПС, а также графических зависимостей для кинематического анализа механизма.
Во вкладке «Чертежи» представлены поясняющие рисунки со схематическим изображением параметров МПС.
Результаты работы программы выводятся на лист книги Excel (все входные и расчетные данные, в том числе координаты точек рабочего пространства, графики сечений рабочего пространства, графики зависимостей длин штанг от радиуса основания и угла наклона шарнира основания) и в лист MathCAD (трехмерное изображение облака точек рабочего пространства (рис. 4) и его проекций на оси координат).
Заключение
Проведена систематизация механизмов параллельной структуры для формализации алгоритмов расчетов их геометрических параметров.
Разработана программа для ЭВМ с целью уменьшения временных затрат при проектировании механизмов параллельной структуры металлообрабатывающих станков с параллельной кинематикой за счет частичной автоматизации труда проектировщика.
Исходным языком программирования является Visual Basic. Среда разработки Visual Basic for Application. Для функционирования данной программы необходима операционная система Windows XP или выше, ПО Microsoft Office Excel 2007 и выше, MathCAD 11 или выше.
Рецензенты:
Козин В.М., д.т.н., профессор, зав. лабораторией механики деформирования, ФГБУН «Институт машиноведения и металлургии» Дальневосточного отделения Российской академии наук, г. Комсомольск-на-Амуре;
Черномас В.В., д.т.н., профессор, главный инженер проекта ООО «ТехКомплект», филиал, г. Комсомольск-на-Амуре.
Работа поступила в редакцию 17.04.2015.
Библиографическая ссылка
Щелкунов Е.Б., Виноградов С.В., Щелкунова М.Е., Сарилов М.Ю. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ МЕХАНИЗМОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ // Фундаментальные исследования. – 2015. – № 2-17. – С. 3748-3752;URL: https://fundamental-research.ru/ru/article/view?id=37850 (дата обращения: 16.04.2024).