



В настоящее время для обеспечения комфортных и безопасных условий управления транспортными средствами используют различные усилители рулевого управления. Эти усилители позволяют, помимо всего прочего, снизить усилие прилагаемое к рулевому колесу, сохранить управление над автомобилем в критической ситуации (разрыв управляемого колеса или повреждение подвески), обеспечивают различную чувствительность рулевого механизма к изменению углового положения рулевого колеса, также обеспечивают самовозврат рулевого колеса при снятии момента на рулевом колесе [1].
Усилители по принципу действия делят на:
1. Пневматические.
2. Гидравлические.
3. Электрогидравлические.
4. Гидрообъёмные.
5. Электромеханические.
Наиболее широкое распространение получили электромеханические усилители рулевого управления (ЭМУР) ввиду их высокой надежности, простоте конструкции, а следовательно, неприхотливости при эксплуатации и простоте при ремонте и обслуживании. Также ЭМУР позволяет реализовать различные алгоритмы управления и обеспечивает экономию топлива по сравнению с гидроусилителями.
В настоящее время большинство автомобилестроительных фирм работают над безвальными усилителями рулевого управления. Под термином «безвальный» понимается такая система, которая не имеет механической связи между рулевым колесом и рулевым механизмом, так называемое «управление по проводам».
Преимущества такой системы очевидны:
1. При использовании данной системы руль может находиться в кабине где угодно, да и кабина может находиться где угодно.
2. Данная система может управляться не только непосредственно водителем, но и совместно с другими электронными системами автомобиля, в том числе бортовым компьютером.
3. Безвальное рулевое управление более компактное и занимает меньше пространства, чем традиционный вальный усилитель со всеми валами и шарнирами.
4. Так как в данной системе меньше механических деталей, следовательно, ремонт и обслуживание проще и дешевле.
Разработки проводных систем рулевого управления ведутся многими отечественными и зарубежными фирмами, работающими в области автотроники. Однако серийно выпускаемых образцов в настоящее время не существует, также отсутствуют и публикации, раскрывающие принцип построения и состав разрабатываемых систем.
Основными требованиями, предъявляемыми к усилителям рулевого управления, являются обеспечение высокой надежности и пропорциональности вращающих моментов на рулевом колесе и рулевом механизме. Учитывая эти требования, разработана функциональная схема системы безвального усилителя рулевого управления (СБУРУ), представленная на рис. 1.
Система включает в себя два взаимосвязанных электропривода – электропривод рулевого механизма (ЭПРМ) и электропривод рулевого колеса (ЭПРК). Первый электропривод является следящим. Он отслеживает изменение положения рулевого колеса и поворачивает управляемые колеса. То есть входным сигналом для него является сигнал с датчика положения рулевого колеса, а в качестве сигнала обратной связи используется сигнал с датчика положения рулевого механизма. В процессе эксплуатации возникает сигнал рассогласования, который отрабатывается исполнительным электродвигателем, до тех пор пока не станет равным нулю. Второй электропривод является моментным. Он воспроизводит крутящий момент на рулевом колесе, пропорциональный моменту, действующему со стороны дороги на рулевой механизм. Таким образом, обеспечивается обратная связь для водителя – так называемое «чувство дороги». Входным сигналом для ЭПРК является сигнал с датчика момента рулевого механизма, а сигнал обратной связи формируется датчиком момента рулевого колеса. Принцип работы аналогичен ЭПРМ. В качестве исполнительных электродвигателей используются синхронные электродвигатели магнитоэлектрического возбуждения, которые управляются системой векторного управления [2]. Таким образом система состоит из двух контуров, это контур регулирования положения (КРП) и контур регулирования момента (КРМ). Рассмотрим их в отдельности.
Структурные схемы КРП и КРМ представлены на рис. 2 и 3 соответственно.
Оба электропривода строятся как системы подчиненного регулирования (СПР) [3, 5]. ЭПРМ включает в себя контуры регулирования тока, скорости и положения. ЭПРК состоит из двух контуров – контура тока и контура момента. К обеим СПР предъявляются особые требования по быстродействию, поэтому использование стандартных настроек и типовых регуляторов в данном случае нежелательно. С этой целью синтезированы быстродействующие регуляторы релейного типа [4]. Далее методом цифрового моделирования в программном пакете MatLab 2011R получены графики переходных процессов взаимосвязанной работы ЭПРМ и ЭПРК, которые изображены на рис. 4 и 5 соответственно.
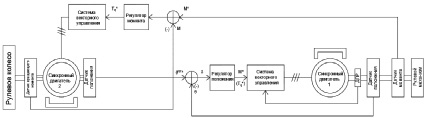
Рис. 1. Функциональная схема СБУРУ

Рис. 2. Структурная схема КРП
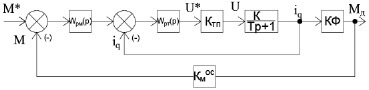
Рис. 3. Структурная схема КРМ
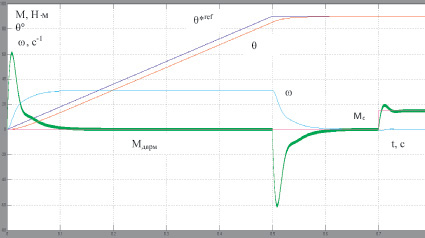
Рис. 4. Графики переходных процессов ЭПРМ
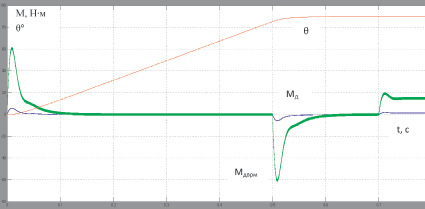
Рис. 5. Графики переходных процессов ЭПРК
На рисунках рулевое колесо поворачивается на определенный угол с максимальным темпом. Система отрабатывает данное задающее воздействие. В момент времени 0,7 [c] наброшен момент сопротивления (колесо наехало на камень или упёрлось в препятствие). Как видно из рис. 5, момент двигателя рулевого механизма воспроизводится электродвигателем рулевого колеса только пропорционально уменьшенный, обеспечивая обратную связь для водителя.
Наиболее целесообразной областью применения данных усилителей рулевого управления является военная техника, многоосевая спецтехника, сельскохозяйственная техника и большегрузные карьерные самосвалы.
В заключение необходимо отметить, что именно мехатронный подход в решении данного вопроса может удовлетворить те жесткие требования, которые предъявляются к усилителям рулевого управления.
Рецензенты:
Брованов С.В., д.т.н., доцент, проректор по учебной работе, Новосибирский государственный технический университет, г. Новосибирск;
Щуров Н.И., д.т.н., профессор, зав. кафедрой электротехнических комплексов, декан факультета мехатроники и автоматизации, Новосибирский государственный технический университет, г. Новосибирск.
Библиографическая ссылка
Антонов И.П., Боченков Б.М. РАЗРАБОТКА СИСТЕМЫ БЕЗВАЛЬНОГО УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ // Фундаментальные исследования. – 2015. – № 8-3. – С. 454-457;URL: https://fundamental-research.ru/ru/article/view?id=38917 (дата обращения: 19.04.2024).