



С 13 по 18 июля 2015 года на полигоне Автозавода группы ГАЗ «Берёзовая пойма» (г. Нижний Новгород) прошли шестые ежегодные полевые испытания беспилотных систем «РобоКросс-2015» в рамках программы: «Робототехника: инженерно-технические кадры инновационной России».
Соревнования «РобоКросс» проводятся с целью:
– популяризации и развития современных технологий среди молодёжи;
– развития робототехнических систем, которые могут найти практическое применение в краткосрочной перспективе.
Задачами соревнований являются:
– демонстрация современного уровня развития технологий для решения конкретных текущих практических задач;
– создание дополнительных возможностей для объединения интересов и усилий исследователей и представителей промышленности в сфере мобильных робототехнических систем;
– стимулирование разработки автономных транспортных систем для решения задач тестирования и испытания транспортных средств.
Задание предполагает разработку робототехнической системы, устанавливаемой на наземное транспортное средство (ТС), которая способна в беспилотном режиме управлять ТС и удерживать его на дороге. Данное задание призвано сделать следующий шаг в разработке систем для испытания ТС на полигонах. Испытания наземных ТС делятся на три класса: ТС с механической коробкой передач, ТС с автоматической коробкой передач и ТС любых гибридных схем силовых агрегатов. Испытываются как автономные, так и телеуправляемые системы.
Задание для наземных ТС заключается в старте ТС из зоны «Старт – Финиш»; движении по испытательной трассе с препятствиями в виде пластиковых бочек со скоростью не более 10 км/ч; развороте в автономном режиме (без участия оператора) при достижении конца трассы (зона разворота имеет размер от 15×15 до 20×20 м и размечена контрольными габаритными линиями); возврате в исходную позицию на старте [5].
Характеристики трассы на полигоне Автозавода группы ГАЗ «Березовая пойма»:
– протяжённость трассы 60–80 м с небольшим изгибом;
– уклоны и подъемы по длине трассы не превышают 5 %;
– ширина трассы на всем протяжении маршрута от 10 до 20 м;
За основу шасси для робота был взят китайский электрический квадроцикл RAZOR Dirt Quad (рис. 1), у которого были сняты лишние детали: руль, пластиковый корпус.

Рис. 1. Электро-квадроцикл RAZOR Dirt Quad
В процессе эксплуатации электрического квадроцикла были выявлены следующие недостатки:
– геометрия рамы выполнена с большой погрешностью (при повороте колёс на некоторый угол одно из них отрывалось от земли);
– штатный привод ведущих колёс не приспособлен под задний ход как механически, так и электрически;
– привод не оказывал никакого сопротивления качению при остановке.
Блок управления роботизированного ТС состоял из персонального компьютера (ПК), промышленного контроллера NI CompactRIO с установленными модулями ввода/вывода ( NI 9263, NI 9205, NI 9403, NI 9870) и блоков управления двигателями [3].
В качестве рулевого агрегата был использован линейный шаговый актуатор ELC57–63. Для определения центрального положения передних колёс рулевой агрегат калибровался с помощью конечного выключателя, расположенного в крайнем правом положении колёс. Силовым агрегатом являлся базовый электродвигатель с редуктором мощностью 300 ватт.
Для работы в телеуправляемом режиме потребовались следующие аппаратные средства (рис. 2). Связь с роботом осуществлялась посредством использования двух комплектов точек доступа Wi–Fi Ubiquiti Rocket M2 и двух всенаправленных Wi–Fi 2×2 MIMO антенн Ubiquiti AirMaxOmni 2G13, работающих в режиме моста. Один комплект был установлен на ТС, второй находился у оператора. Рабочее место оператора было оснащено ПК, управление ТС велось с пульта. Видеоданные с IP–камеры AXIS M5014 передавались по сети Wi-Fi на ПК оператора.
Для работы в автономном режиме потребовались следующие аппаратные средства (рис. 3). Для определения положения и параметров движения использовалась бесплатформенная инерциальная навигационная система (БИНС) КомпаНав–2МТ. Модуль определял параметры движения робота в инерциальной системе отсчета (положение, скорость, ускорение, курс, тангаж, крен и т.д.) Для обнаружения препятствий применялся лазерный сканирующий дальномер HOKUYO UTM–30LX–EW.
Программное обеспечение (ПО) было реализовано на графическом языке программирования National Instruments LabVIEW с установленными модулями NI Robotics, NI FPGA, NI Real–Time Module, NI Vision [2]. Управляющая программа (УП) была разделена на два уровня: верхний и нижний.
Нижний уровень – УП, реализованная на реконфигурируемой программной логической интегральной схеме (ПЛИС). ПЛИС является частью промышленного контроллера cRIO-9075. Для программирования ПЛИС был использован модуль LabVIEW FPGA, предназначенный для разработки систем, каналы ввода/вывода которых, а также встроенные специализированные устройства обработки данных, выполняются реконфигурируемыми, причем алгоритм их функционирования реализуется на аппаратном уровне [1]. На этом уровне решались следующие задачи: управления исполнительными и сигнальными элементами (рулевой агрегат, силовой агрегат и сигнальная лампа), получение данных с кнопочного пульта, аварийной кнопки и конечного выключателя и калибровка рулевого агрегата. Нижний уровень управления не меняется в зависимости от режима работы ТС.
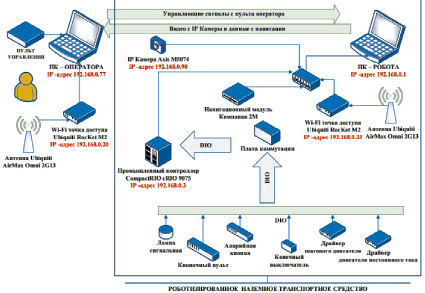
Рис. 2. Структурная схема роботизированного ТС в телеуправляемом режиме
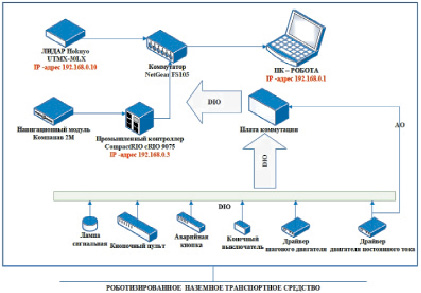
Рис. 3. Структурная схема роботизированного ТС в автономном режиме
Верхний уровень для телеуправляемого режима работы представляет собой УП, реализованную на ПК оператора и ПК робота. Данная УП имеет клиент-серверную структуру для двунаправленной передачи данных по Wi-Fi каналу. Данные с ПК оператора представляют собой управляющие сигналы, подаваемые на исполнительные механизмы ТС. Передача осуществлялась по протоколу TCP/IP. Данные с ПК робота представляют собой видеосигнал с IP-камеры и сигнал с навигации. Передача осуществлялась по протоколу UDP.
Верхний уровень для автономного режима работы представляет собой УП, реализованную на ПК робота. На этом уровне осуществляется получение и обработка данных с навигации и лидара. На основе полученных данных решались задачи навигации и объезда препятствий.
Алгоритм автономного движения ТС по трассе имел следующий вид: в УП вносились координаты точек следования, робот стремился оказаться в максимально близкой окрестности точки, при этом, по данным с лидара, строилась картина препятствий и определялись веса свободных участков, оценивались их размеры и близость к требуемому вектору движения. В результате получался заданный курс, максимально близкий к требуемому, но проходящий через свободное пространство. При достижении максимально возможного приближения к текущей заданной точке маршрута робот переключался на следующую. В случае, когда ТС достигало точки в зоне разворота, робот осуществлял поворот на 180 градусов и следовал в зону старта/финиша по заданным точкам в обратном порядке.
Данный алгоритм автономного движения ТС был протестирован на работоспособность в виртуальной среде Robotics Environment Simulator (рис. 4). В качестве робота для проведения виртуальных испытаний был выбран робот из стандартной библиотеки среды Robotics Environment Simulator – SD6 Simulation [4]. На эту модель были установлены виртуальные навигация и лидар. В ходе процесса симуляции робот успешно объезжал препятствие, осуществлял движение по точкам с заданными координатами и осуществлял разворот в заданной зоне. Отработанный алгоритм был использован на реальной модели с учётом её отличий от виртуальной.
В результате полевых испытаний (рис. 5) роботизированное ТС показало себя следующим образом. Реализованный алгоритм движения ТС работал стабильно с препятствиями, расставленными по регламенту. Некорректная работа алгоритма наблюдалась в ситуации, когда несколько препятствий отстояли друг от друга на расстояние менее полутора метров. Использованный модуль навигации выдавал данные с погрешностью порядка 8–10 метров, что отрицательно влияло на построение траектории движения и детектирование зоны разворота. Несмотря на сопутствующие трудности, ТС успешно прошло квалификационные и зачётные заезды и, по итогам полевых испытаний, заняло 4-е место в общем зачете и получило номинацию «Системный подход». В условиях сжатых сроков и значительного объема работы команда смогла подготовить автономное транспортное средство и участвовать в категории «Свободный класс».
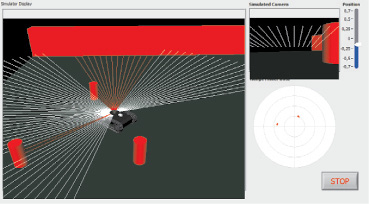
Рис. 4. Симуляция автономной работы робота на виртуальной трассе в среде Robotics Environment Simulator

Рис. 5. Полевые испытания роботизированного ТС на полигоне Автозавода группы ГАЗ «Березовая пойма» (г. Нижний Новгород)
Рецензенты:
Панов А.Ю., д.т.н., профессор кафедры «Теоретическая и прикладная механика», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород;
Иванов А.А., д.т.н., профессор кафедры «Автоматизация машиностроения», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.
Библиографическая ссылка
Сизов А.Ю., Туманов А.А., Федосова Л.О. РАЗРАБОТКА И ПОЛЕВЫЕ ИСПЫТАНИЯ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА // Фундаментальные исследования. – 2015. – № 9-2. – С. 309-313;URL: https://fundamental-research.ru/ru/article/view?id=39096 (дата обращения: 17.04.2024).