



При выполнении лесозаготовительных операций большое влияние на производительность лесовозной техники оказывают, как правило, природно-производственные условия, рельеф местности и др. Для описания системы «машина ? грунт» и эффективности ее взаимодействия служит основной показатель – проходимость.
В работах многочисленных авторов [1, 2, 3, 6] проходимость имеет две трактовки:
1. Возможность лесовозной техники выполнять единичные проезды в пределах лесосеки с уплотнением верхнего растительного слоя почвы без его разрушения.
2. Возможность лесовозной техники делать многократные проходы по волоку с разрушением верхнего растительного слоя и образованием колеи.
С ростом числа проездов колея расширяется. С углублением колеи лесотранспорт с помощью заднего моста доуплотняет грунт, тем самым ухудшает проходимость. В работах [1, 5, 6] авторы предлагают трактовать проходимость как способность лесотранспортной машины двигаться с соответствующей силой тяги без разрушения плодородного слоя почвы.
Снижение проходимости снижает сменную производительность лесотранспортных машин. Поэтому повышение проходимости является, несомненно, актуальным вопросом при совершенствовании эффективности вывозки древесины.
В работах [1–6] и работах других ученых описаны зависимости для оценки проходимости как гусеничных, так и колесных машин. Например, критерий проходимости, описывающий проходимость колесного транспорта по естественной поверхности, определяется как
где k – коэффициент, учитывающий сцепную массу машины; ψ – коэффициент сцепления; ωср – удельное сопротивление движению, Н/т; iз – продольный уклон; g – ускорение свободного падения, м/с2.
Профессор В.Ф. Бабков предлагает оценивать способность проезда лесотранспорта по грунту с учетом его деформации с помощью показателя проходимости:
Π = kψ – fср ≥ i,
где fср – усредненный коэффициент сопротивления движению.

где Gn, fn – нагрузка и параметр сопротивления движению n-й оси автопоезда соответственно.
И оценивает проходимость лесотранспорта как отношение соответствующей удельной нагрузки на естественную поверхность к соответствующей максимальной несущей способности этой поверхности.
Предлагается следующая зависимость для оценки проходимости:

где v = f + i – коэффициент сопротивления движению, включающий сопротивление качению и продольный уклон. Проходимость улучшается при росте числителя дроби.
Также предлагается оценивать проходимость с помощью следующего отношения:

где Мf – момент сопротивления движению; Мv – предельный момент по сцеплению.
В то же время анализ показал ограниченность применения этих показателей, так как они не учитывают природно-производственные факторы. Таким образом, необходимы дальнейшие исследования и изыскания в области повышения эффективности взаимосвязи «машина ? грунт».
Неровности волоков необходимо рассматривать в увязке с габаритами комплексных трелевочно-транспортных систем (КТТС). Для машины с малой базой, например 2 м, наклонная поверхность длиной 3 м является уклоном, а для машин или поездов длиной более 3 м такая неровность будет лишь «горбом» [1, 2, 4, 5].
Кроме того, часто повторяющиеся неровности вызывают вибрацию и колебания машин, что ведет к снижению скорости.
Отдельные значительные неровности (препятствия) могут привести к остановке КТТС.
Различают два вида потерь проходимости ТТС при встрече с неровностями – из-за недостаточного дорожного просвета и при упоре передней части КТТС в препятствие. Частным случаем потери проходимости, характерном для трелевочных волоков, будет движение по волоку, имеющему очень глубокие колеи [6].
Условие обеспечения проходимости машин через одиночное выпуклое препятствие типа «горб» (рис. 1) выражается неравенством
hгаб + p1 – R ≤ Rпр, (1)
где hгаб – дорожный просвет, см; R – радиус колеса, см; Rпр – радиус продольной проходимости, см.
h1 = (R + Rпр)?sin αo. (2)
Согласно рис. 1 величину угла αo можно найти из равенства
 (3)
(3)
где l – база машины, м.
Из выражений (2) и (3) можно получить следующие условия проходимости:
 (4)
(4)
С учетом (3) это условие можно переписать так:

Так как

то

откуда
 (5)
(5)
Зная величину αo, по формуле (3) и (4) можно определить минимальный радиус проходимости (продольной) для любой конкретной машины.
При преодолении резервов или широких канав потеря проходимости КТТС может иметь место в случаях, когда машина передней выступающей перед передней осью частью (точка А на рис. 2) упирается:
– в откос канавы (рис. 2, а) или
– в дно канавы (рис. 2, б).
При малой глубине канавы упор бампером может быть и в поверхность земли за канавой.
При упоре передней части машины в откос канавы потеря проходимости будет в случае (рис. 2, а) если
?cos α ≥ b – b2 + b1,  ,
,
где b – ширина канавы по дну, м.
Имея в виду, что 0A = l1 – l; 

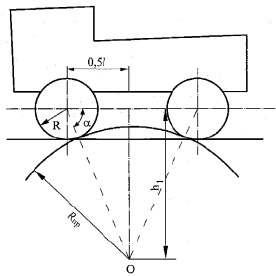
Рис. 1. Расчетная схема для определения радиуса продольной проходимости машины
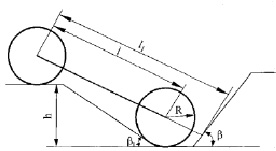
а
б
Рис. 2. Ограничение проходимости колесной машины выраженными неровностями: а – переход через канаву; б – подъём по откосу канавы (резерва)
Получим
 (6)
(6)
При упоре передней выступающей частью в дно резерва или канавы потери устойчивости, как это видно на рис. 2, б, будут иметь место при
 (7)
(7)
При обходе непреодолимых препятствий КТТС происходит снижение скоростей движения КТТС. На трелевочном волоке такими препятствиями могут быть крупные пни высотой, превышающей дорожный просвет, валуны и т.п.
При выборочных рубках непреодолимыми препятствиями являются стоящие деревья.
Решение рассматриваемой задачи заключается в определении добавочного протяжения на единицу пути, необходимого для обхода препятствия. Отношение рабочей скорости к действительной принимается равным [7]
 (8)
(8)
где Z – добавочная длина пути, м.
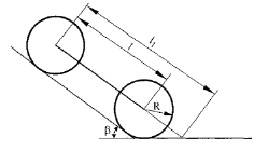
Предположим, что на пути движения КТТС в пределах волока имеются препятствия в виде стенок длиной S, расположенные перпендикулярно движению и случайно расположенные (рис. 3).
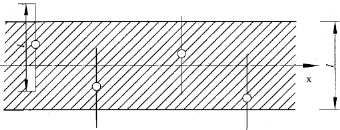
Рис. 3. Расчетная схема для определения снижения скорости движения КТТС при обходе непреодолимых препятствий (деревьев)
При движении по направлению «х» КТТС будет обходить препятствия, количество которых будет в среднем равно числу N на 1 кв. м. При ширине волока l максимальный путь обгона будет равен lN. При встрече с препятствием машина должна пройти путь l/2 – S для обхода препятствия, чтобы затем продолжать путь в заданном направлении (здесь S – расстояние от середины стенки до точки упора машины в препятствие).
Средний добавочный пробег на одну стенку составит
а средний добавочный пробег на 1 км
 (9)
(9)
Необходимо отметить, что снижение времени хода КТТС практически в основном определяется не только удлинением пути, но и уменьшением скорости во избежание столкновения с препятствием, что можно учесть коэффициентом Kсн.
Таким образом,
 (10)
(10)
Для круглых препятствий диаметром α
 (11)
(11)
Формулы (10) и (11) получены при допущениях, что препятствия имеют одинаковые размеры, а машина (ТТС) представляет собой материальную точку.
Библиографическая ссылка
Бурмистрова О.Н., Арутюнян А.Ю., Бурмистров Д.В. ВЛИЯНИЕ ВЫРАЖЕННЫХ НЕРОВНОСТЕЙ НА ПРОХОДИМОСТЬ КТТС // Фундаментальные исследования. – 2015. – № 11-7. – С. 1308-1312;URL: https://fundamental-research.ru/ru/article/view?id=39829 (дата обращения: 19.04.2024).