



Гидродинамическая томография позволяет проводить прогноз пространственного распределения фильтрационного сопротивления проницаемого пласта на основании принципов томографии, используя данные гидродинамического прослушивания и анализ динамики реперной точки кривой восстановления давления [1, 2].
Применение технологии гидродинамической томографии позволяет получать детальную пространственную информацию о распределении фильтрационного сопротивления в межскважинном пространстве проницаемого пласта. Технология томографии заключается в обработке и анализе веерных измерений интервальных времен наступления реакции в скважинах-приемниках на изменение режима давления в скважинах-источниках.
Практическая реализация технологии гидродинамической томографии может быть основана как на прямых измерениях интервальных времен распространения характерных точек кривых восстановления давления в веерной системе из нескольких скважин, так и на косвенных – анализе истории разработки месторождения. В первом случае необходимые исходные данные для реализации томографической обработки информации берутся из прямого эксперимента на месторождении – возникает активная модификация гидродинамической томографии. Для прямого эксперимента гидродинамической томографии необходима реализация достаточно затратной и технологически трудоемкой схемы действий. Во втором случае данные веерной системы наблюдений по выбранной сети скважин, необходимые для выполнения томографического моделирования, синтезируются исходя из построенной модели месторождения по данным истории разработки в виде динамики дебита и нагнетания по всем скважинам в пределах выбранного временного интервала [3, 6]. Такая технология гидродинамической томографии называется пассивной гидродинамической томографией. Прогноз томографических данных реализуется вычислительным экспериментом над построенной математической моделью месторождения в рамках гипотезы о характере ее основных компонентов.
Для решения задачи нахождения пространственного распределения фильтрационного сопротивления проницаемого пласта необходимо использовать метод последовательных приближений относительно распределения коэффициента пьезопроводности, организованных в итерационный процесс решения интегрального уравнения, характеризующего динамику движения реперной точки по исходным данным интервальных времен движения между парами скважин. Перед началом вычислений выдвигается предположение о форме пространственного распределения коэффициента пьезопроводности по сетке месторождения и вытекающими из него траекториями и временами движения особых точек распространения давления. Затем вычисляются поправки к этому пространственному распределению, обеспечивающие наилучшее приближение интервальных времен, полученных в результате моделирования процесса движения особых точек кривой восстановления давления к наблюдаемым интервальным временам динамики давления между парами скважин (источник-приемник). Для рассчитанного таким образом пространственного распределения коэффициента пьезопроводности вычисляются новые траектории и соответствующие им интервальные времена. Далее, если совпадение моделируемых интервальных времен с наблюдаемыми удовлетворительное, то итерационный процесс последовательных приближений заканчивается и решение задачи найдено. В противном случае процесс расчета интервальных времен повторяется с использованием нового распределения коэффициента пьезопроводности, которое будет использоваться в качестве начального приближения.
Рассмотрим поэтапно вычислительную схему гидродинамической томографии. Для дискретизации процесса на область рассматриваемого месторождения S накладывается сетка размерностью X×Y. Ячейки сетки обозначаются парой индексов {(i, j)} так, что каждая точка области ξ в сеточном представлении однозначно идентифицируется своей парой индексов ξ(i, j) = (i, j). В области S задано начальное распределение коэффициента пьезопроводности k(ξ) = k(i, j). На сетке месторождения расположены скважины, которые между собой образуют Q пар, где m = 1–M – количество скважин-источников сигнала и n = 1–N – количество скважин-приемников сигнала (Q = N×M). Распространение возмущения для каждой пары скважин происходит по траекториям Lq = L(ξqm, ξqn), имеющим начало в точке ξqm = (i, j)qm и окончание в точке ξqn= (i, j)qn. Траектории обозначаются индексом q = 1–Q и время движения возмущения вдоль Lq равно τq. Текущая координата сети вдоль пути Lq обозначается переменной ξq = (i, j)q. Обозначим через l(ξ) путь, который проходит волна от начала ξqm = (i, j)qm до точки ξq на траектории Lq. Время распространения движения волны τq рассчитывается при помощи следующего оператора:
 (1)
(1)
что в дискретном представлении:
 (2)
(2)
На основе соотношения (2) строятся кратчайшие траектории движения особых точек Lq согласно принципу Беллмана с условиями минимизации на интервальные времена τq. Полученные траектории и используем в дальнейших расчетах.
Пусть  есть наблюдаемое время распространения давления (точки перегиба кривой восстановления давления), измеренное в результате эксперимента и которое соответствует пространственному распределению коэффициента пьезопроводности k(ξ) + Δk(ξ). Необходимо найти Δk(ξ) такое, чтобы рассчитанное Δτq было максимально приближено к
есть наблюдаемое время распространения давления (точки перегиба кривой восстановления давления), измеренное в результате эксперимента и которое соответствует пространственному распределению коэффициента пьезопроводности k(ξ) + Δk(ξ). Необходимо найти Δk(ξ) такое, чтобы рассчитанное Δτq было максимально приближено к  . Тогда разность Δτq наблюдаемого и рассчитанного интервальных времен получаем в виде соотношения, которое выражается из нескольких приближенных равенств:
. Тогда разность Δτq наблюдаемого и рассчитанного интервальных времен получаем в виде соотношения, которое выражается из нескольких приближенных равенств:
 (3)
(3)
Меняя знак, получаем
 (4)
(4)
Оператор A′[k(ξ)] суть производная Фреше [5] к оператору A[k(ξ)] в «точке» k(ξ). A′[k(ξ)] – линейный оператор, действующий на вектор Δk(ξ). Формулы (3) и (4) получены в предположении того, что величина Δk(ξ) настолько мала, что произведение (k(ξ) + Δk(ξ))•k(ξ) ≈ k(ξ)2 и траектории Lq = L(ξqm, ξqn) для пьезопроводности k(ξ) + Δk(ξ) и k(ξ) с достаточной точностью совпадают.
Уравнение (4) в дискретной форме выглядит следующим образом:
 (5)
(5)
Если количество узлов сети в траектории q равно Nq, то размерность вектора Δk(i, j) равна
 .
.
Областью значения преобразования (5) служит вектор Δτ = {Δτq} размерности Q. После того как вектор Δk(i, j) найден, следующее приближение к распределению коэффициента пьезопроводности определяется правилом
k1(ξ) = k(ξ) + Δk(ξ). (6)
Вычислительной основой для решения задачи (5) относительно вектора Δk(i, j) в точках ξ(i, j) траекторий Lq = L(ξqm, ξqn) служит итерационный процесс, на z + 1 итерации, имеющий вид
 (7)
(7)
 (8)
(8)
где φz – разница между наблюдаемыми интервальными временами и временами, рассчитанными на итерации z.
Нулевое приближение принимаем равным Δk0(i, j) = 0.
Числовой параметр αz – параметр релаксации, подбираемый на каждом шаге так, чтобы итерационный процесс (7) сходился [4]:
 (9)
(9)
где A′*[k(ξ)] – сопряженный к A′[k(ξ)] оператор, определяемый условием для – мерного вектора y = {yq, q = 1–Q}:
 (10)
(10)
Здесь X – функциональное пространство для распределения приращения к коэффициенту пьезопроводности Δk(ξ). В дискретном представлении для нашего случая это пространство RС (где C – размерность Δk(i, j) и Q – размерность y), а условие (10) примет вид
 (11)
(11)
Подставляя в уравнение (11) выражение (5), получим
 (12)
(12)
Для того чтобы приведенное равенство имело смысл, следует специальным образом организовывать суммирование в правой части, что в конечном итоге определяет вид оператора  .
.
Значение оператора  на Q-мерном векторе y есть значения вектора g(i, j) для индексов (i, j) = {(i, j)qm...(i, j)qn, q = 1–Q}. Для индексов (i, j) выделяются значения q(i, j), определяющие траектории Lq, в интервалы которых попадают эти индексы. Далее конструируем выражение для вычисления значения сопряженного оператора на векторе y:
на Q-мерном векторе y есть значения вектора g(i, j) для индексов (i, j) = {(i, j)qm...(i, j)qn, q = 1–Q}. Для индексов (i, j) выделяются значения q(i, j), определяющие траектории Lq, в интервалы которых попадают эти индексы. Далее конструируем выражение для вычисления значения сопряженного оператора на векторе y:
 (13)
(13)
Здесь lq(i, j)(i, j) – это длина участка траектории Lq от начальной точки до точки (i, j), в которой выполняется расчет g(i, j). Уравнение (13) при y = φz примет вид
 (14)
(14)
 а
а 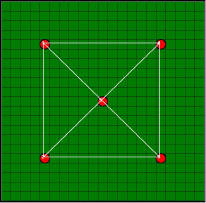 б
б
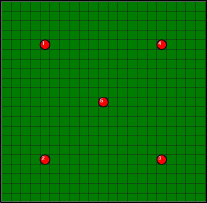
Рис. 1. а – сетка скважин и нулевое приближение среды; б – траектории движения сигнала между скважинами Lq на первой итерации
После того как итерационный процесс завершился согласно условию в (7) и найдено решение Δk(i, j) уравнения (5) для (6), служащее новым приближением для распределения пьезопроводности в узлах, определяемых траекториями вдоль сети, на области S рассчитываются новые траектории  , на основе которых весь процесс повторяется.
, на основе которых весь процесс повторяется.
Приведем пример работы алгоритма гидродинамической томографии на примере тестового месторождения. В качестве примера рассмотрим модель месторождения, на которой расположены 5 скважин. Для нулевого приближения распределения фильтрационного сопротивления сгенерирована однородная среда k0(ξ) (рис. 1). Заданы тестовые наблюдаемые интервальные времена  между парами скважин, Q = 20. На первой итерации по нулевому приближению находим траектории движения возмущения Lq (рис. 2) между парами скважин и рассчитываем соответствующие этим траекториям интервальные времена τq.
между парами скважин, Q = 20. На первой итерации по нулевому приближению находим траектории движения возмущения Lq (рис. 2) между парами скважин и рассчитываем соответствующие этим траекториям интервальные времена τq.
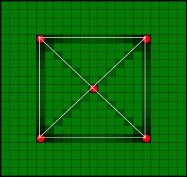
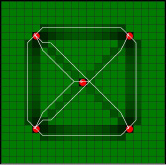
После завершения итерационного процесса и нахождения Δk(i, j), по формуле (6) определяем новые значения (рис. 2, а). На рис. 2, б представлен график динамики относительной погрешности φ между тестовыми и рассчитанными интервальными временами внутри итерационного процесса (7) на первой итерации. На рис. 3, а и б представлены результаты оптимизации среды после двух и десяти итераций соответственно.
 а
а  б
б
Рис. 2. а – результаты работы оптимизационного процесса (7) на первой итерации; б – динамика средней относительной погрешности φ на первой итерации
 а
а 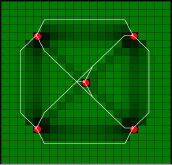 б
б
Рис. 3. а – результаты оптимизационного процесса на второй итерации; б – результат оптимизации среды после десяти итераций
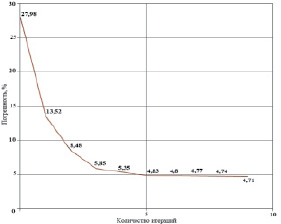
Рис. 4. Динамика относительной погрешности по Δτ
На рис. 4 представлен график динамики средней относительной погрешности по Δτ после нахождения траекторий движения сигнала между скважинами (3). Далее происходит оценка этой величины и принятие решения о продолжении процесса вычислений (7).
Результаты расчета пространственного распределения фильтрационного распределения вдоль траекторий движения сигнала между парами скважин для тестовой модели показали, что выбранный алгоритм оптимизации может быть применен для поиска k = k0 + Δk на основе выбранного начального приближения k0. Следующим шагом необходимо разработать метод интерполяции значений Δk на всю сетку рассматриваемого месторождения с учетом информации о расположении и качестве имеющихся начальных данных. Для реализации этого алгоритм будет основан на теории нечетких множеств.
Библиографическая ссылка
Кобрунов А.И., Кунцев В.Е., Мотрюк Е.Н. ВЫЧИСЛИТЕЛЬНАЯ СХЕМА ГИДРОДИНАМИЧЕСКОЙ ТОМОГРАФИИ // Фундаментальные исследования. – 2016. – № 7-2. – С. 230-235;URL: https://fundamental-research.ru/ru/article/view?id=40489 (дата обращения: 25.04.2024).