



Изучение динамики незамкнутых кинематических цепей с конечным числом степеней свободы является актуальной задачей для различных областей науки и техники, например, исследования динамики механических манипуляторов [5].
Целью данной работы является развитие методов исследования динамики незамкнутых кинематических цепей, а также разработка математической модели динамики механической системы шарнирно-соединенных стержней (рис. 1) с двумя степенями свободы. В работе решается частная задача по определению закона движения системы в обобщенных координатах.
Материалы и методы исследования
Рассматривается механическая система, состоящая из двух абсолютно твердых стержней, длины которых обозначим l1, l2. Стрежни соединены между собой шарниром O1. Стержень 1 закреплен при помощи неподвижного цилиндрического шарнира O. На стержень 1 действует момент активных сил M.
Задача решается при следующих предположениях:
– все шарниры являются идеальными (силы трения и их моменты отсутствуют);
– движение происходит в горизонтальной плоскости (силы тяжести не совершают работы);
– момент активных сил является постоянным M = const.
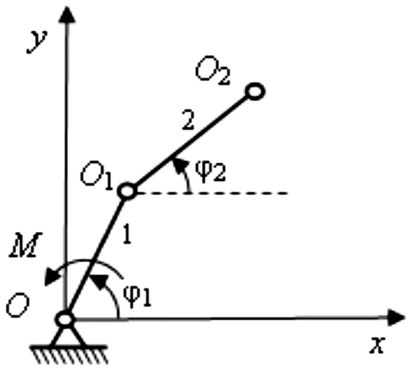
Рис. 1. Кинематическая схема: 1, 2 – абсолютно твердые стержни; O1, O2, – идеальные шарниры; φ1, φ2 – углы поворота стержней; M – момент активных сил
Для решения задачи об определении закона движения механической системы используется метод уравнений Лагранжа II рода [2, 4]. Система имеет две степени свободы. В качестве обобщенных координат выбраны углы поворота стержней φ1, φ2. Таким образом, уравнения Лагранжа II рода можно записать в виде
![]() (1)
(1)
где φi – обобщенные координаты системы; ![]() – обобщенные скорости;
– обобщенные скорости; ![]() – обобщенные силы; T – кинетическая энергия системы.
– обобщенные силы; T – кинетическая энергия системы.
Кинетическая энергия системы определяется как сумма кинетических энергий двух стержней по формуле
T = T1 + T2, (2)
где T1 – кинетическая энергия стержня 1, T2 – кинетическая энергия стержня 2.
Кинетическая энергия стержня 1 определяется по формуле [6]
![]() (3)
(3)
где ![]() – момент инерции стержня 1 относительно точки O.
– момент инерции стержня 1 относительно точки O.
Кинетическую энергию стержня 2 определим по формуле [6]
![]() (4)
(4)
где mk – масса k-й точки стержня 2; ![]() – вектор скорости k-й точки стержня 2.
– вектор скорости k-й точки стержня 2.
Скорость ![]() определяется теоремой сложения скоростей
определяется теоремой сложения скоростей
![]() (5)
(5)
где ![]() – вектор скорости k-й точки стержня 2 от переносного движения (вектор скорости полюса – точки O1);
– вектор скорости k-й точки стержня 2 от переносного движения (вектор скорости полюса – точки O1); ![]() – вектор относительной скорости k-й точки стержня 2 от его вращения вокруг полюса O1.
– вектор относительной скорости k-й точки стержня 2 от его вращения вокруг полюса O1.
Подставляя (5) в выражение (4), получим
![]() (6)
(6)
где (ϕ2 – ϕ1) – угол между вектором скорости переносного движения ![]() и вектором относительной скорости
и вектором относительной скорости ![]() .
.
Запишем выражения для переносной скорости ![]() и относительной скорости
и относительной скорости ![]()
![]() ;
; ![]() ,
,
где rk – радиус вектор k-й точки стержня 2 в относительном вращении вокруг полюса O1.
Подставляя эти выражения в формулу (6) для кинетической энергии стержня 2, получим
![]()
Раскрывая скобки, получим
![]() (7)
(7)
Учитывая, что ![]() – масса стержня 2,
– масса стержня 2, ![]() – статический момент стержня 2 относительно точки O1,
– статический момент стержня 2 относительно точки O1, ![]() – момент инерции стержня 2 относительно точки O1, окончательно для кинетической энергии стержня 2 получим
– момент инерции стержня 2 относительно точки O1, окончательно для кинетической энергии стержня 2 получим
![]() (8)
(8)
Запишем выражение для кинетической энергии системы
![]()
![]() (9)
(9)
Определим производные от кинетической энергии системы, необходимые для составления левых частей уравнений Лагранжа.
![]() (10)
(10)
![]() (11)
(11)
![]()
 (12)
(12)
![]()
![]() (13)
(13)
Правые части уравнений Лагранжа представляют собой обобщенные силы, определяемые выражением
![]() ,
,
где ![]() – сумма работ активных сил, действующих на систему на ее возможном перемещении.
– сумма работ активных сил, действующих на систему на ее возможном перемещении.
Учитывая, что на систему действует только момент активных сил M, получим
Q1 = M; Q2 = 0. (14)
Подставляя выражения (10), (11), (12), (13) и (14) в уравнения Лагранжа (1), получим систему двух дифференциальных уравнений второго порядка относительно обобщенных координат ϕ1 и ϕ2
![]() (15)
(15)
![]() (16)
(16)
Введем обозначения:
![]()
![]()
![]()
Уравнения (15) и (16) принимают вид
![]() (17)
(17)
![]() (18)
(18)
Введя обозначения
![]()
![]()
![]()
![]()
и ![]() получим
получим
![]() ; (19)
; (19)
![]() (20)
(20)
Выразим вторые производные по времени ![]() и
и ![]()
![]()
![]()
Решение этой системы уравнений может быть осуществлено различными численными методами [1, 3].
Результаты исследований и их обсуждение
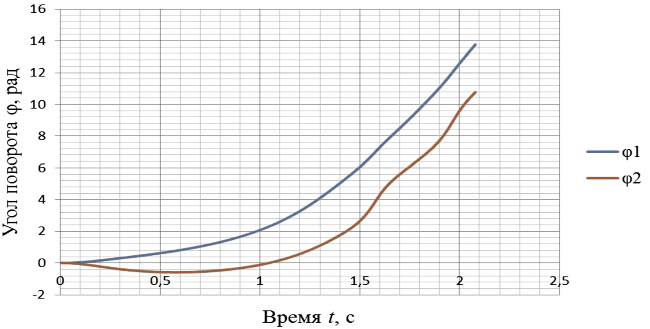
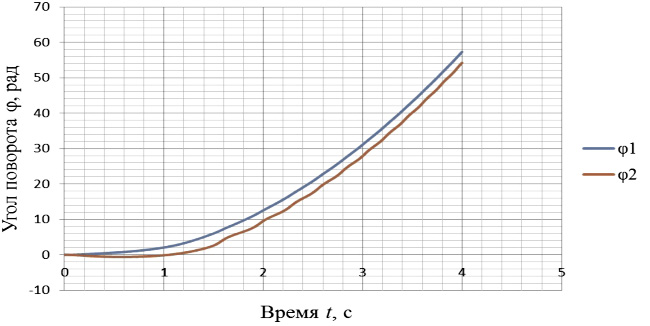
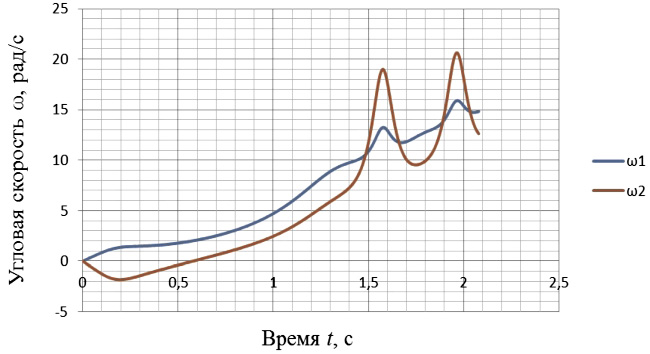
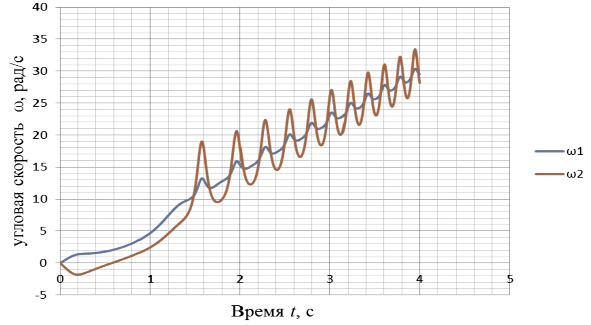
Рассмотрим результаты решения, полученные при реализации метода Рунге‒Кутта четвертого порядка. На рис. 2 представлены зависимости углов поворота стержней φ1 и φ2 от времени t, а на рис. 3 показаны зависимости угловых скоростей ![]() и
и ![]() от времени. Представленные зависимости получены при следующих исходных данных и начальных условиях:
от времени. Представленные зависимости получены при следующих исходных данных и начальных условиях:
m1 = m2 = 1 (кг), l1 = l2 = 1 (м),
M = 5 (Н∙м), t = 0,
![]() ,
, ![]() ,
,
![]() ,
, ![]() .
.
Анализ результатов решения показывает, что движение системы можно разделить на два этапа. Первый этап неустановившегося движения, когда стержни 1 и 2 вращаются в противоположных направлениях (рис. 2a и 3a). Через небольшой промежуток времени после начала движения начинается второй этап, на котором стержни 1 и 2 начинают вращаться в одном направлении (рис. 3б), причем стержень 2 как бы догоняет стержень 1. Можно говорить о начале установившегося движения. Стержни при этом располагаются практически в прямую линию.
а
б
Рис. 2. Зависимость углов поворота стержней от времени: а – зависимость углов поворота стержней от времени на этапе неустановившегося движения; б – зависимость углов поворота стержней от времени на этапе установившегося движения
а
б
Рис. 3. Зависимость угловых скоростей от времени: а – зависимость угловых скоростей от времени на этапе неустановившегося движения; б – зависимость угловых скоростей от времени на этапе установившегося движения
Заключение
Анализ графиков угловых скоростей показывает, что движение стержня 2 обладает признаками периодичности. Угловая скорость стержня 2 периодически меняется относительно угловой скорости стержня 1 (рис. 3). Рассматривая движение стержня 2 как сложное, состоящее из переносного движения стержня 1 и относительного движения стержня 2 по отношению к вращающейся точке O1, сделаем вывод, что относительное движение стержня 2 можно рассматривать как затухающее колебание.
Результаты решения, полученные при других исходных данных и начальных условиях, позволяют сделать следующие выводы:
– длительность неустановившегося движения зависит от момента активных сил М, при увеличении момента активных сил время неустановившегося движения уменьшается;
– минимальное значение угла поворота второго стержня φ2 не зависит от величины момента активных сил, а зависит только от начальных условий.
Результаты работы могут быть использованы для разработки математических моделей динамики незамкнутых кинематических цепей.
Рецензенты:Панов А.Ю., д.т.н., заведующий кафедрой «Теоретическая и прикладная механика», ФГБОУ ВПО «Нижегородский государственный технический университет», г. Нижний Новгород;
Иванов А.А., д.т.н., профессор кафедры «Автоматизации машиностроения», ФГБОУ ВПО «Нижегородский государственный технический университет», г. Нижний Новгород.
Работа поступила в редакцию 05.12.2013.