



Технологические процессы производства бумаги осуществляются с помощью большого количества аппаратов непрерывного и циклического действия, различных по конструкции и принципам действия. В совокупности с большой протяженностью и разветвленностью самих процессов это подчеркивает сложность и многообразие решаемых задач в области автоматизации целлюлозно-бумажного производства. А как показывает практика, состав и конфигурация автоматизированных систем управления в первую очередь зависят от особенностей технологии изготовления бумаги [9].
Поскольку проводить экспериментальные работы на действующем оборудовании не всегда целесообразно, предлагается оптимизировать отдельные технологические процессы производства бумаги, используя физические модели. Для этих целей была спроектирована специальная учебно-экспериментальная лабораторная установка [2]. В процессе разработки физической модели технологического процесса, близкого по характеристикам к производственной системе, была использована теория подобия [1], которая позволила задать и определить, насколько технологический процесс, протекающий в лабораторных условиях, близок производственному процессу. Создание физической модели для отдельного технологического процесса производства бумаги на основе теории подобия [3] позволяет путем моделирования полнее изучать протекание процесса и проводить работы по поиску оптимальных решений при управлении технологическим оборудованием.
Материалы и методы исследования
Экспериментально-учебная установка [2], которая моделирует участок технологического процесса подготовки бумажной массы целлюлозно-бумажного производства, в настоящее время используется как в экспериментальных исследованиях с целью настройки и оптимизации систем автоматического управления, так и в учебном процессе, при организации лабораторных работ.
Конструктивно установка состоит из пяти емкостей, последовательно соединённых системой трубопроводов, имитирующих технологические бассейны реального технологического участка подготовки бумажной массы. Система трубопроводов содержит четыре сетевых насоса c частотно регулируемым электроприводом, ручные и регулирующие клапаны с электроприводом, трубчатый электронагреватель, датчики основных технологических параметров – расход, давление, концентрация. Все емкости снабжены датчиками уровня, системой защиты от перелива и соединены с дренажной системой слива массы через ручные вентили.
Совокупность локальных контуров регулирования можно принять за единое целое и описывать как некоторую систему, которая состоит из объекта регулирования и регулирующих устройств, которые воздействуют на параметры объекта через исполнительные механизмы.
Основой рассматриваемого технологического процесса установки является подача свежей воды в бассейн Е4, где она смешивается с реагентом до получения концентрированного раствора и поступает в бассейн E2, где концентрированный раствор разбавляется до нужной концентрации для подачи в напорный ящик (НЯ) экспериментальной установки. Поэтому важнейшую роль в процессе приготовления концентрированного раствора играет контур разбавления свежей водой. Контур осуществляет стабилизацию подачи концентрированного раствора из емкости Е4 в емкость Е2 для разбавления до нужной концентрации. Следует отметить, что необходимо постоянно поддерживать концентрацию раствора перед напорным ящиком в заданных пределах, удовлетворяющих технологическому процессу подготовки бумажной массы.
В научно-исследовательских и учебных целях для контура регулирования концентрации независимо от остальных локальных контуров регулирования [4] было принято решение использовать нечеткий регулятор [6, 7, 5] для управления подачей требуемого концентрированного раствора в напорный ящик.
Для исследования и моделирования спроектированной системы регулирования концентрации была составлена модель системы трубопроводов рассматриваемого участка. Для получения модели был использован метод планирования эксперимента, на основе ортогонального центрального композиционного плана второго порядка [10]. Настройка параметров модели осуществлялась на основе экспериментальных данных, полученных непосредственно на действующей экспериментальной установке.
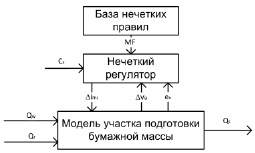
Рис. 1. Структура моделируемой системы управления: MF – функции принадлежности; Cs – заданная концентрация; ∆iпч – ток задания частоты; ∆Ve – скорость изменения ошибки; eк – ошибка между действительной и заданной концентрацией; Qs – расход раствора в напорный ящик; Qr – расход реагента; Qw – расход свежей воды
На рис. 1 представлена структурная схема моделируемой системы управления. Регулирование объема подачи концентрированного раствора выполняется за счет регулирования частоты вращения насоса. Управление частотой осуществляется при помощи нечеткого регулятора, имеющего два входных канала и один выходной. На вход регулятора поступает сигнал рассогласования (eк) между заданной массовой долей (Сs) и действительной массовой долей вещества в емкости Е2, а также сигнал скорости изменения величины рассогласования (∆Ve). На выходе регулятора – управляющее воздействие в виде приращения величины аналогового задания тока (∆iпч) на частотный преобразователь.
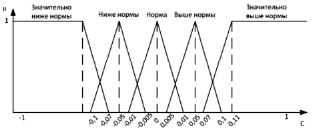
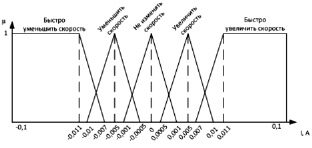
Основой нечеткой логики регулятора являются лингвистические переменные, которые описывают числовые величины при помощи словесного описания [7, 5]. Взаимосвязь между числовыми значениями и лингвистическими переменными регулятора осуществляется при помощи термов, графическое изображение которых приведено на рис. 2.
а

б
в
Рис. 2. Графическое представление функций принадлежности: а – величины ошибки сигнала; б – величины скорости изменения ошибки сигнала; в – изменения величины приращения тока задания
В таблице представлена нечеткая база правил, позволяющая связать между собой лингвистические переменные входных и выходной величин регулятора.
Результаты исследования и их обсуждение
В ходе исследования разработана полная имитационная модель системы управления учебно-экспериментальной установки. Схема моделирования контура регулирования концентрации, выполненная в среде моделирования Matlab/Simulink [8], представлена на рис. 3.
Анализируя полученный график переходного процесса изменения концентрации (рис. 4), видно, что начиная с 0 по 3000-ю секунды происходит наполнение емкостей до заданного уровня и подготовка концентрированного раствора. Далее, продолжая с 3000-й секунды, начинается процесс разбавления концентрированного раствора до требуемой концентрации. Вместе с этим происходит откачка воды из емкости Е4 в напорный ящик, равная 1,6 м3/с, что ускоряет процесс установления концентрации раствора до требуемой величины.
База нечетких правил
|
Приращение тока задания частоты вращения |
Скорость изменения ошибки |
|||||
|
Сильно растет |
Растет |
Не изменяется |
Падает |
Сильно падает |
||
|
Ошибка между заданной и действительной величиной |
Много больше |
Сильно увеличить |
Сильно увеличить |
Увеличить |
Увеличить |
Не изменять |
|
Больше |
Сильно увеличить |
Увеличить |
Увеличить |
Не изменять |
Уменьшить |
|
|
Норма |
Сильно увеличить |
Увеличить |
Не изменять |
Уменьшить |
Сильно уменьшить |
|
|
Меньше |
Сильно уменьшить |
Уменьшить |
Уменьшить |
Не изменять |
Увеличить |
|
|
Много меньше |
Сильно уменьшить |
Сильно уменьшить |
Уменьшить |
Уменьшить |
Не изменять |
|
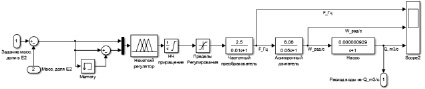
Рис. 3. Контур регулирования концентрации
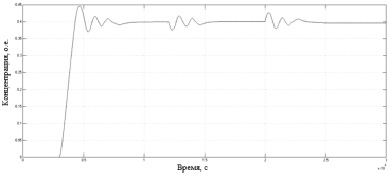
Рис. 4. Результаты моделирования контура регулирования концентрации
В начальный момент времени возникает перерегулирование равное 10 % от заданной величины. В момент времени 12000 секунд в качестве возмущающего воздействия был увеличен расход массы в НЯ на величину в 0,5 м3/с, а на 20000-й секунде было подано аналогичное отрицательное воздействие. Оба момента времени вызывают небольшой колебательный процесс с перерегулированием около 5 % с установлением заданной величины концентрации. Время колебательного процесса и величина перерегулирования могут быть уменьшены в результате корректировки базы нечетких правил или термов.
Заключение
В ходе проведенных исследований была предложена система нечеткого управления для контура приготовления концентрированного раствора учебно-экспериментальной установки. Данный контур играет важную роль в процессе подготовки раствора для подачи в напорный ящик. Как показывают результаты имитационного моделирования, спроектированный нечеткий регулятор позволяет поддерживать концентрацию раствора перед напорным ящиком в заданных пределах и плавно отрабатывать возмущающие воздействия по расходу реагента напорным ящиком. Моделирование участка подготовки бумажной массы в среде Matlab/Simulink и на экспериментальной установке позволяет выполнять исследования технологического процесса и системы управления непосредственно перед реализацией в реальном производстве.
Рецензенты:
Казанцев В.П., д.т.н., доцент, профессор кафедры микропроцессорных средств автоматизации, Пермский национальный исследовательский политехнический университет, г. Пермь;
Цаплин А.И., д.т.н., профессор, зав. кафедрой общей физики, Пермский национальный исследовательский политехнический университет, г. Пермь.
Работа поступила в редакцию 06.11.2014.