



Подсистема обеспечения контроля целостности (КЦ) информации в автоматизированной информационной системе вневедомственной охраны (АИСВО) является важной составляющей системы защиты. При функционировании подсистемы контроля целостности в противоречие вступают полнота контроля и ресурсы, затрачиваемые системой на его обеспечение. Это временные и вычислительные ресурсы, а также объем памяти, отводимый под хранение эталонных копий информационных объектов [2]. Возникает задача поиска оптимального коэффициента контроля целостности [3], который определяет ту часть объекта контроля, которая проверяется на неизменность. Для решения этой задачи подсистема управления контроля целостности эталонной АИСВО имеет вид, представленный на рис. 1. Подсистема контроля качества функционирования сервиса КЦ использует в качестве входных данных статистику выполнения процедур КЦ модулей различных уровней эталонной модели защищенной автоматизированной системы (ЭМЗАС) [5]. Поставщиком статистической информации в виде (M,  ,
,  ,
,  , tm) должна выступать подсистема регистрации и учета [4]. Здесь M – количество процедур контроля целостности на уровнях АИСВО;
, tm) должна выступать подсистема регистрации и учета [4]. Здесь M – количество процедур контроля целостности на уровнях АИСВО;  ;
;  – объем контролируемой на целостность информации при m-й процедуре;
– объем контролируемой на целостность информации при m-й процедуре;  – коэффициент m-й процедуры КЦ;
– коэффициент m-й процедуры КЦ;  – момент начала m-й процедуры; tm – момент окончания m-й процедуры [1].
– момент начала m-й процедуры; tm – момент окончания m-й процедуры [1].
Для получения статистических данных подсистема контроля качества функционирования сервиса КЦ преобразует входные данные в статистические:

 (1)
(1)
С ростом M пересчет величин vобщ, τобщ можно проводить рекуррентно, выражая значения M наблюдений через прошлые значения 
 по результатам (M – 1) наблюдений следующим образом:
по результатам (M – 1) наблюдений следующим образом:

 (2)
(2)
Рекуррентные формулы (2) используются вместо формул (1).
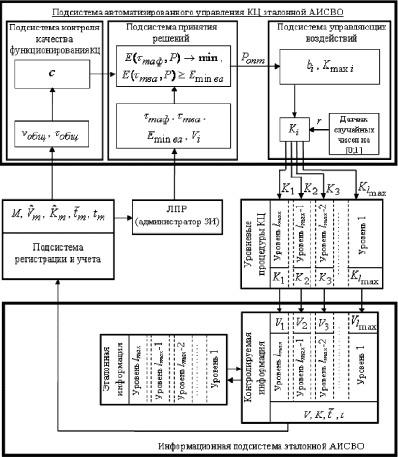
Рис. 1. Структурная схема управления сервисом КЦ эталонной АИСВО
После обработки величин  ,
,  ,
,  ,
,  , tM,
, tM,  по формулам (2) определяются текущие значения величин vобщ, τобщ. Выходным параметром подсистемы контроля качества функционирования сервиса КЦ является текущая оценка скорости проверки на неизменность объектов АИСВО, определяемая по формуле:
по формулам (2) определяются текущие значения величин vобщ, τобщ. Выходным параметром подсистемы контроля качества функционирования сервиса КЦ является текущая оценка скорости проверки на неизменность объектов АИСВО, определяемая по формуле:
 (3)
(3)
Подсистема принятия решения должна выбрать такой независимо варьируемый параметр, который сделает невозможным прогнозирование полноты проверки информации на неизменность на каждом уровне АИСВО. На вход подсистемы принятия решений подается определяемое по формуле (3) «c», а также фигурирующие в эксплуатационной документации требования к подсистеме защиты информации от НСД, величины Vi,  , τmаф, τmва, Emin ва. Здесь Vi – объем контролируемой на неизменность информации на i-м уровне АИСВО, Emin ва – минимальное значение критерия временной агрессивности функционирования подсистемы контроля целостности. Введем вспомогательный критерий E(τm), который назовем критерием динамической эффективности функционирования сервиса КЦ. Способ управления параметрами задан величинами Pmin, Pmax и функциональными зависимостями управляемых параметров от параметра P, изменяемого независимо. Для выбора оптимального значения Pопт независимо варьируемого параметра подсистема принятия решений реализует решение задачи математического программирования для переменной P.
, τmаф, τmва, Emin ва. Здесь Vi – объем контролируемой на неизменность информации на i-м уровне АИСВО, Emin ва – минимальное значение критерия временной агрессивности функционирования подсистемы контроля целостности. Введем вспомогательный критерий E(τm), который назовем критерием динамической эффективности функционирования сервиса КЦ. Способ управления параметрами задан величинами Pmin, Pmax и функциональными зависимостями управляемых параметров от параметра P, изменяемого независимо. Для выбора оптимального значения Pопт независимо варьируемого параметра подсистема принятия решений реализует решение задачи математического программирования для переменной P.
Определим P* как значение параметра P, для которого справедливо
E(τmва, P*) = Emin ва;
P* ∈ [Pmin, Pmax]. (4)
Так как функция E(τm, P) монотонна по P при любых τm > 0, то при
E(τmва, Pmax) < Emin ва (5)
решение Pопт не существует (некорректность исходных данных Emin ва, τmва), иначе существует единственное решение:
 (6)
(6)
Так как для АИСВО следующее условие:
E( τmва, Pmin) ≤ E(τmва, Pmax) (7)
выполняется всегда, условие корректности исходных данных имеет вид
E( τmва, Pmax) ≥ E min ва, (8)
а если выполнено
E( τmва, Pmin) ≥ Emin ва, (9)
то Pопт = Pmin, иначе Pопт = P*.
Задача определения Pопт в целях управления подсистемой контроля целостности эталонной АИСВО вычислительно простая [4].
При функционировании подсистемы принятия решений представляет интерес изучение закономерностей управления процессом контроля целостности эталонной АИСВО. Для этого целесообразно использовать построение и исследование графических зависимостей критерия динамической эффективности и характеристик случайной величины времени реализации контроля целостности при определенном дискреционном доступе от независимо варьируемого параметра P в прямоугольных системах координат для фиксированных исходных данных задачи выбора оптимального значения Pопт этого параметра. При фиксации τm по графикам y = E(τm, P) можно визуально производить выбор Pопт и оценивать максимально достижимое значение Eаф(Pопт) критерия Eаф. Если кривая y = E(τmва, P) целиком лежит ниже прямой y = Emin ва, то Pопт не существует (некорректные исходные данные), если выше, то Pопт = Pmin, а иначе Pопт = Pmax. Наконец, если есть точка пересечения, то ее абсцисса P* есть искомое значение Pопт = P*. А искомое значение Eаф(Pопт) получается вычитанием из единицы ординаты точки с абсциссой Pопт, лежащей на кривой y = E(τmаф, P).
На рис. 2 представлена блок-схема алгоритма выбора оптимального значения параметра P как стохастического средства управления подсистемой контроля целостности эталонной АИСВО на основе оценки его эффективности. Содержание блоков следующее.
В первом блоке реализуется ввод начальных данных, описанных выше, для расчетов, которые проводятся подсистемой контроля качества функционирования сервиса контроля целостности.
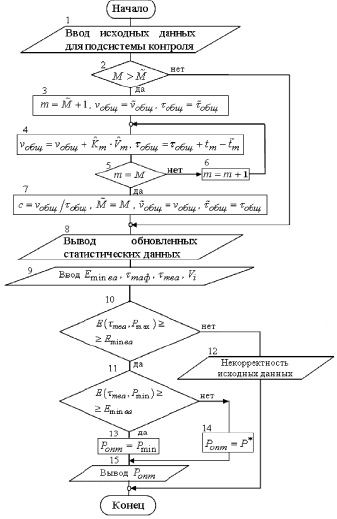
Рис. 2. Блок-схема алгоритма выбора оптимального значения независимо варьируемого параметра при управлении сервисом контроля целостности эталонной АИСВО
Во втором блоке проверяется условие  где
где  , M – количество уровневых процедур КЦ, зарегистрированных до предоставления предпоследнего и последнего списков соответственно, если оно истинно, то
, M – количество уровневых процедур КЦ, зарегистрированных до предоставления предпоследнего и последнего списков соответственно, если оно истинно, то  индекс параметров последнего списка.
индекс параметров последнего списка.
В третьем блоке осуществляется присвоение начальных значений 

 а также реализуется перебор записей списка, который предоставляется подсистемой регистрации и учета.
а также реализуется перебор записей списка, который предоставляется подсистемой регистрации и учета.
В четвертом блоке происходит пересчет промежуточных статистических данных подсистемы контроля:


В пятом и шестом блоках происходит накопление переменной m = m + 1.
Блок 7 посвящен обновлению статистических данных подсистемы контроля:




В восьмом блоке происходит вывод статистических данных c,  ,
,  ,
,  , рассчитанных подсистемой контроля.
, рассчитанных подсистемой контроля.
В девятом блоке происходит вывод исходных данных E min ва, τmаф, τmва, Vi.
Десятый и одиннадцатый блоки посвящены проверке условий соответственно (8) и (9).
В 13 и 14 блоках происходит присвоение Pопт значений Pmin, P* согласно (4).
В блоках 12, 15 осуществляется вывод результатов: «некорректность исходных данных» и оптимальное значение Pопт независимо варьируемого параметра.