



Современный уровень развития передачи и приема информации ставит задачу высокой помехоустойчивой системы. Дуплексные системы передачи в настоящее время широко распространены в системах телекоммуникаций. Используются в двух вариантах: двух- и четырехпроводном. Разумеется, дуплексная передача по двухпроводному каналу является экономически более выгодной, однако технически она более сложно реализуема. Причиной является необходимость компенсации эхо-сигналов. Причина возникновения эхо-сигналов – разбалансировка дифференциальной системы, разделяющей направления передач. Известны различные методы компенсации эхо-сигналов: с помощью модели эхо-тракта в виде трансверсального фильтра или путем выборки необходимых образцов эхо-сигналов из блока памяти при табличном методе компенсации. В первом случае для работы эхокомпенсатора требуется производить большое количество операций умножения и сложения, а во втором необходим большой объем памяти для хранения всех возможных образцов эхо-сигналов. В последние годы появился новый метод эхокомпенсации, который в литературе называется по-разному: относительный, инвариантный. Исследованию этого метода посвящено немало публикаций, а также диссертационных исследований, включая докторские диссертации. Однако всем этим исследованиям присущ существенный недостаток – все внимание уделено анализу частотных искажений, вносимых в принимаемый сигнал эхокомпенсатором, при полном игнорировании влияния сигналов собственного передатчика на работу эхокомпенсатора. Отсутствует также исследование влияния разбалансировки дифференциальной системы, которая может произойти после окончания обучения эхокомпенсатора. Отсутствие этих исследований не позволяет дать рекомендации по практическому применению инвариантных эхокомпенсаторов. Одним из возможных подходов к решению данной задачи является совместное использование метода относительной амплитудной модуляции и инвариантного подхода передачи сообщений [1, 2].
Разработка структурной схемы эхокомпенсатора с квадратурными каналами
На базе теории инвариантов [3] синтезирован так называемый инвариантный эхокомпенсатор и построена структурная схема обобщенного инвариантного эхокомпенсатора.
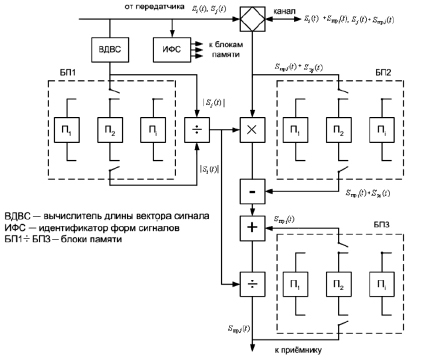
Рис. 1. Обобщенная структурная схема инвариантного эхокомпенсатора
В обобщенной схеме инвариантного эхокомпенсатора, изображенного на (рис. 1), имеется блок идентификации форм сигналов. Его задача – анализировать форму передаваемого на данном интервале времени сигнала и отыскивать в блоке памяти образцы уже переданных сигналов, которые отличаются от передаваемого сигнала только постоянным множителем.
Задачу идентификации форм сигналов можно решать разными способами. Наиболее целесообразным в плане технической реализации представляется следующий способ.
Будем исходить из того, что в большинстве современных высокоскоростных систем передачи используются комбинированные виды модуляции, чаще всего – амплитудно-фазовая модуляция. При её реализации посредством суммирования двух амплитудно-модулированных сигналов с несущими, сдвинутыми по фазе на 90°, она называется квадратурной амплитудной модуляцией (КАМ).
При таком способе реализации КАМ передаваемые сигналы, поступающие на вход дифференциальной системы от передатчика, можно записать в виде известного выражения:SКАМ(t) = Asin(ωt + φ) = Asinsinωt + Acoscosωt, (1)
где Asin и Acos – амплитуды квадратурных составляющих сигналов SКАМ(t);
при этом 

Выражение (1) позволяет любой амплитудно-фазовый модулированный сигнал Si(t), передаваемый в i-й интервал времени, однозначно соотнести с двумя числами Ai sin и Ai cos. Для хранения этих чисел достаточно двух ячеек памяти – БП1 и БП2. При этом вследствие «подобия» любых двух чисел (каждое число после умножения на постоянный множитель по-прежнему остаётся числом) отсутствует необходимость в блоках памяти, предназначенных для хранения образцов форм ранее переданных сигналов [4, 5]. Таким образом, обобщённая схема инвариантного эхокомпенсатора в случае использования амплитудно-фазовой модуляции (КАМ) существенно упрощается за счёт исключения блока идентификации форм сигналов и блока памяти для хранения образцов ранее переданных сигналов.
При представлении потока передаваемых сигналов Si(t) двумя потоками чисел Ai sin и Ai cos аналогичное представление должно быть реализовано и для сигналов на входе схемы эхокомпенсации. Это означает, что на выходе дифференциальной системы необходимо включить два коррелятора с опорными колебаниями Ssin(t) = sinωt и Scos(t) = cosωt.
Разумеется, что корреляторы должны работать синхронно с корреляторами, которые обрабатывают переданный сигнал Si(t) и вычисляют величины Ai sin и Ai cos.
Схема инвариантного эхокомпенсатора с квадратурными каналами обработки сигналов представлена на рис. 2.
Этапу передачи сообщений предшествует этап обучения. Обучение эхокомпенсатора заключается в передаче передатчиком обучающего сигнала Sоб(t). Результаты вычислений его квадратурных компонент записываются в блоки памяти БП1 и БП2. Результаты вычисления его квадратурных компонент записываются в блоки памяти БП1 и БП2. Результаты вычисления квадратурных компонент сигнала-эха Sоб э sin и Sоб э cos помещаются в блоки памяти БП3 и БП4. Блоки памяти БП5 и БП6 – обучены.
В рабочем режиме схема работает следующим образом.
Передаваемый амплитудно-фазово-модулированный сигнал поступает на вход дифференциальной системы и, одновременно, на левый блок корреляторов, состоящих из умножителей и интеграторов. Работа интеграторов и ключей Кл1 и Кл2 синхронизируется передатчиком таким образом, что начало и конец времени интегрирования совпадает с границами передаваемых сигналов [6].
Через ключи Кл1 и Кл2 вычисленные величины Ai sin и Ai cos поступают соответственно на входы блоков памяти БП1 и БП2. В этих блоках памяти хранятся предыдущие значения A(i-1) sin и A(i-1) cos.
Аналогичная схема, состоящая из двух корреляторов, подключена к выходу дифференциальной системы.
Эти корреляторы вычисляют коэффициенты разложения суммы принимаемого сигнала Si пр(t) и эхо-сигнала Si э(t), порождаемого передаваемым сигналом Si(t).


где τ0 - длительность передаваемых и принимаемых сигналов; ω - частота несущей передаваемых сигналов с комбинированной амплитудно-фазовой модуляцией.
Через ключи Кл3 и Кл4 значения AisinΣ и AicosΣ поступают соответственно на входы блоков памяти БП3 и БП4.
В этих блоках памяти хранятся предыдущие значения:
А(i-1)sinΣ = А(i-1)sin пр + А(i-1) э sin (в БП3)
и
А(i-1)cosΣ = А(i-1)cos пр + А(i-1) э cos (в БП4).
В блоках памяти БП5 и БП6 находятся предыдущие значения А(i-1)sin пр и А(i-1)cos пр.
В конце передачи сигнала Si(t) делители Д1 и Д2 вычисляют отношение:
 и
и 
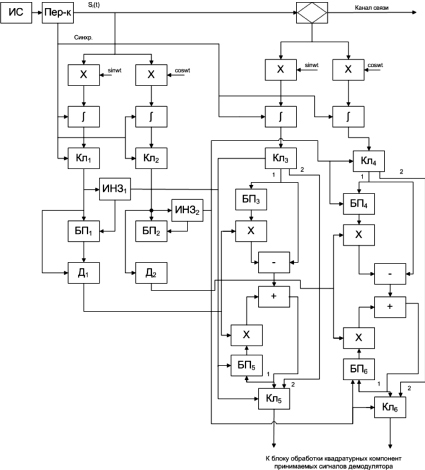
Рис. 2. Структурная схема инвариантного эхокомпенсатора с квадратурными каналами обработки сигналов
Величины К1 и К2 поступают на умножитель левого канала и правого канала схемы эхокомпенсации, состоящей из зеркально симметричных структур. Левый канал включает в себя блок памяти БП3, умножитель, сумматор, вычитатель и зеркально-симметричную структуру БП5. Правый канал состоит из БП4, умножителя, вычитателя, а симметричная нижняя часть – из БП0, умножителя и сумматора.
После умножения на К1 величины эха А(i-1)sin, хранящейся в БП3 и на К2 величины А(i-1)cos, хранящейся в БП4, полученные произведения будут равны наблюдаемым в данный момент величинам эха на выходах ключей Кл3 и Кл4, т.е.:
А(i-1) э sin·К1 = Аi э sin;
А(i-1) э cos·К2 = Аi э cos. (2)
Напомним, что эти равенства следуют из свойств инвариантности (сохраняемости) отношения длин векторов на входе и выходе линейной системы (в данном случае – эхо-тракта дифференциальной системы).
Вследствие равенств (2) на выходе вычитателей эхо-сигналы будут отсутствовать.
Нижние части схемы каналов эхокомпенсатора служат для восстановления структуры принимаемых сигналов, которые нарушаются верхними частями схем каналов эхокомпенсатора. После устранения эха квадратурные компоненты принимаемого сигнала Ai пр sin и Ai пр cos поступают в блок, где их обрабатывают в демодуляторе приемника.
Решения проблемы «деления на ноль» в схеме инвариантного эхокомпенсатора с квадратурными каналами обработки сигналов
В исходной обобщённой схеме инвариантного эхокомпенсатора ввиду того, что в современных системах передачи данных сигналы, равные нулю, не используются, вычислитель длин векторов передаваемых сигналов, соответственно, не может выдавать результаты расчётов длин векторов, равные нулю. Вследствие этого при вычислении отношения длин векторов передаваемых сигналов проблема деления на ноль не может возникнуть. Однако в описанной выше схеме эта проблема может возникнуть, так как величины Ai sin и Ai cos могут принимать нулевые значения. В этом случае, во-первых, делители Д1 и Д2 не смогут вычислять К1 и К2, а во-вторых, при равенстве нулю Ai sin или Ai cos соответствующие им величины эха тоже будут равны нулю.
По этим значениям, находящимся в БП3 и БП4, будет невозможно рассчитать величины эха для следующего интервала времени.
Решение данной проблемы может быть следующим. Подключим к выходам ключей Кл1 и Кл2 индикаторы нулевых значений Ai sin и Ai cos – ИНЗ1 и ИНЗ2.
При передаче сигнала Si(t), в котором Ai sin и/или Ai cos равны нулю, на выходах корреляторов, подключенных к выходу диффсистемы, соответствующие значения Ai э sin и Ai э cos тоже будут равны нулю. С учётом этого квадратурные компоненты принимаемого сигнала Ai пр sin или Ai пр cos можно подать на входы приёмника непосредственно, минуя схемы эхокомпенсации. Это реализуется ключами Кл1, Кл2, Кл3, Кл4, у которых задействованы соответственно вторые выходы и вторые входы.
В этот же момент по командам, поступающим от ИНЗ1 и/или ИНЗ2, запрещается запись нуля (нулей) в БП1 и/или БП2. В этих блоках памяти сохраняется прежнее содержание. Запрещается также обновление содержимого блоков памяти БП3, БП5 и/или БП4, БП6 и вообще работа схемы компенсации прекращается на время, пока величины Ai sin и/или Ai cos будут равны нулю.
Вследствие (после передачи сигналов с нулевыми значениями Ai sin и Ai cos) для вычисления Ai э sin и Ai э cos будут использоваться предыдущие ненулевые значения A(i-n) sin и A(i-k) cos (n и k – количество интервалов времени длительностью τ0 до предыдущего интервала с ненулевыми значениями).
Разумеется, что ИНЗ1 и ИНЗ3 также управляют и работой ключей Кл3, Кл4 и Кл5, Кл6: при обнаружении нуля эти ключи переключаются в положение «2».
Заключение
Преимуществом данной схемы по сравнению с обобщенной схемой инвариантного эхокомпенсатора является отсутствие таких сложных в реализации блоков, как идентификатор формы сигналов, вычислителя длин векторов сигналов.
Рецензенты:
Сединин В.И., д.т.н., профессор, заведующий кафедрой «Системы автоматизированного проектирования», ФГБОУ ВПО СибГУТИ, г. Новосибирск;
Носов В.И., д.т.н., профессор, заведующий кафедрой «Системы радиосвязи», ФГБОУ ВПО СибГУТИ, г. Новосибирск.
Работа поступила в редакцию 18.04.2014.
Библиографическая ссылка
Абрамов С.С. ИНВАРИАНТНЫЙ АДАПТИВНЫЙ ЭХОКОМПЕНСАТОР С КВАДРАТУРНЫМИ КАНАЛАМИ ОБРАБОТКИ ИНФОРМАЦИИ // Фундаментальные исследования. – 2014. – № 6-5. – С. 909-913;URL: https://fundamental-research.ru/ru/article/view?id=34261 (дата обращения: 26.04.2024).