



Одним из резервов повышения продуктивности животных и качества получаемой продукции является полноценное использование генетического потенциала, который может быть реализован только у физиологически здорового животного. К сожалению, на животноводческих предприятиях не в достаточной мере обращают внимание на изменение физиологического состояния животного, которое во многом определяется состоянием кожного покрова животного. Механическая обработка кожного покрова животного позволяет в полной мере выполнять кожному покрову все свои функции, получать продукцию высокого качества, способствовать увеличению продуктивности животного [10].
В наших исследованиях [8, 9] доказано, что процесс обработки кожного покрова животного следует рассматривать как сложную биотехническую систему (БТС). Для создания математической модели функционирования сложной БТС необходим системный подход, базирующийся на формализованных методах: информационном, функциональном и физиологическом [6, 7]. Применяя их последовательно, можно: выделить взаимосвязи элементарных структурных звеньев (подсистем) объекта моделирования; определить структуру и отношение между элементами при декомпозиции и структуризации; оценить их свойства и параметры при параметризации; выявить зависимость между параметрами подсистем, действующими внешними и внутренними факторами и получаемыми показателями при идентификации. Построенные на таком подходе, математические модели позволяют проводить анализ и структурный синтез биотехнической системы формализованными методами.
В исследованиях Л.П. Карташова, Л.В. Погорелова [5, 7] отмечается, что морфологические свойства биотехнических систем характеризуются связями между элементами. Определяют энергетические, вещественные и информационные связи. Энергетические связи характеризуют энергосиловое взаимодействие элементов и энергетическое соотношение между ними (тепловая, электрическая, механическая, энергия корма). Вещественные связи определяют перенос, обмен или изменение физической характеристики обслуживаемого объекта. Информационные связи – определяют накопление, обработку и анализ информации о функционировании отдельных подсистем и системы в целом.
Связи между оператором и техническим звеном являются в основном вещественными и информационными. Обосновывается это тем, что оператор получает информацию от технического звена и, физически воздействуя на него, изменяет при необходимости текущее состояние.
Между оператором и животным, двумя биологическими самонастраивающимися подсистемами, связь очень сложная, характеризуется и вещественными, и информационными, и энергетическими составляющими, но преимущественно преобладают вещественные связи.
Связь между техническим звеном и животным при механической обработке кожного покрова обуславливается энергосиловым взаимодействием и приводит к изменению состояния обеих подсистем, в некоторых процессах (очистка кожного покрова КРС, вычесывание пуха, стрижка шерсти) можно наблюдать и вещественные связи.
Для анализа и оценки эффективности функционирования каждой подсистемы ее можно представить в виде многопараметрической модели, имеющей несколько входов и выходов. Такая система, функционируя, обеспечивает получение готового продукта, количество и качество которого определяет цель функционирования и выражается входными параметрами.
Входные данные, характеризующие эффективность функционирования системы следует разделить на две группы. Подходы и принципы изучения каждой из групп существенно отличаются друг от друга. К первой группе следует отнести функционально-технологические факторы воздействия на подсистему «машина» и возмущающие факторы воздействия на БТС в целом, эти факторы, обусловленные заранее заданными, известными значениями. Следовательно, эффективность механической обработки кожного покрова можно спрогнозировать, при определенных ограничениях и условиях, достаточно точно. В этом случае – все параметры, составляющие факторы, необходимо рассматривать как определенные, что позволяет использовать их для оптимизации средств механической обработки кожного покрова. Ко второй группе данных относятся функционально-технологические факторы, направленные на объект воздействия (животное) со стороны подсистем «человек» и «машина», которые сложно фиксировать на определенном уровне, но не учитывать эти факторы, действующие непрерывно или дискретно, нельзя, т.к. невозможно получить объективное представление о протекании процесса при функционировании технического звена системы. Требуется установить их статистические характеристики, которые позволяют выявить зависимости или закономерности их изменения, оценить их качественно и количественно. Поэтому для обоснования оптимальных параметров и режимов работы сложной БТС нами применялись методы статистического и имитационного моделирования.
Взаимосвязи между подсистемами сложной БТС, установленные на основе статистического и имитационного моделирования, позволили оптимизировать входные и обосновать выходные данные (параметры) функционирования биотехнической системы [2] механической обработки кожного покрова животных.
Выходные физиологические и технологические показателя животного, а также выходные производственно-экономические показатели определяют реагирование биотехнической системы на изменение данных первой группы факторов, а также учитывают влияние второй группы данных. Состояние процесса механической обработки кожного покрова животного при системном подходе определяется как переменная величина, которая в любой момент времени определяет значение выходных данных.
Согласно существующей технологии механической обработки кожного покрова животного (на примере машинной стрижки овец) при наступлении момента времени для стрижки (созревание жиропота, установление благоприятной обстановки окружающей среды) – овец загоняют в загон для неостриженных овец. Откуда подавальщик или сам стригаль доставляет животное к месту стрижки, фиксирует, приступает непосредственно к обработке кожного покрова, используя при этом стригальную машинку, оканчивает стрижку, выпускает животное в загон для остриженных овец. В результате всего процесса животное последовательно контактирует с подавальщиком, столом (стеллажом) при фиксации, стригалем, стригальной машинкой. Вся последовательность этих операций воздействует на животное, в результате чего происходит изменение его состояния, т.е. переход из одного состояния в другое. Этот переход может произойти не только в соответствии или несоответствии конкретных режимных параметров стригальной машинки, но и правильного или неправильного воздействия или поведения со стороны оператора (стригаля).
Таким образом, мы наблюдаем сложную биотехническую систему механической обработки кожного покрова животного, условно разделенную на три подсистемы: So – человек – оператор, Sж – животное (объект воздействия, Sу – устройство (средство воздействия).
Основываясь на анализе имеющихся исследований по механической обработке кожного покрова животных, приняты следующие состояния подсистем:
Животное: Sж1 – животное в нормальном физиологическом состоянии, получаемая продукция – высокого качества; Sж2 – животное в нормальном физиологическом состоянии, но снижается его продуктивность; Sж3 – животное в беспокойном состоянии, но получаемая при этом продукция удовлетворительного качества; Sж4 – животное в беспокойном состоянии, наблюдается снижение продуктивности и качество получаемой продукции.
Устройство: Sу1 – устройство в рабочем состоянии, способствует получению продукции высокого качества; Sу2 – устройство в рабочем состоянии, но требует регулировки конструктивно-режимных параметров, получаемая продукция высокого или среднего качества; Sу3 – устройство допускает отказы в работе и снижает качество получаемой продукции; Sу4 – устройство неработоспособно.
Оператор: So1 – оператор выполняет процесс механической обработки кожного покрова животного в соответствии с технологическим регламентом и способствует получению продукции высокого качества; So2 – оператор не полностью выполняет технологический регламент, что не способствует получению продукции высокого качества; So3 – оператор выполняет технологический регламент с грубыми нарушениями, что приводит к получению продукции низкого качества, нарушению работы подсистемы «устройство», ухудшению физиологического состояния подсистемы «животное».
Для примера рассмотрим динамику перехода системы из одного состояния в другое (на примере машинной стрижки овец). Животные попадают в загон для неостриженных овец, наблюдая при этом работу стригаля, слыша шум работы стригального пункта и т.д. В дальнейшем согласно технологическому регламенту стригаль (подавальщик) доставляет животное к месту стрижки, в зависимости от качества выполнения этой операции животное может получить дополнительный стресс или травму, что нарушит нормальное физиологическое состояние или потребует больших усилий на удержание животного в том или ином положении при стрижке, тем самым увеличивая ее продолжительность. Исходя из вышеизложенного и анализа исследований принято четыре возможных состояния животного Sж1, Sж2, Sж3, Sж4, которые приведены выше.
Оператор (стригаль) обязан воздействовать на все подсистемы, регулировать настройки стригальной машинки, управлять положением овцы, соблюдать скоростной режим перемещения стригальной машинки по поверхности кожного покрова животного и т.д.; от знаний, умений, навыков и качества выполнения этих операций зависит работа всей системы в целом. Но не следует оставлять без внимания и тот факт, что оператор работает не с одним животным, и у него недостаточно времени, чтобы уделить особое внимание каждому. Стрижка – наиболее энергоемкий процесс по отношению к оператору, требуются значительные физические усилия для её осуществления, что приводит к физической усталости и утомлению. Но все операции, предусмотренные технологическим регламентом, оператор должен выполнять четко, последовательно и без нарушений, в противном случае возможен переход к необратимому процессу (гибели животного). Из вышеизложенного следует, что работа оператора требует большого внимания и физического напряжения. На основе технологических операций, выполняемых оператором, напряженности его труда – нами приняты три состояния системы «человек – оператор» Sо1, Sо2, Sо3.
Задачами технической подсистемы является: качественный срез шерстного покрова без нарушение целостности кожного, обеспечение минимального количества образования сечки, которая засоряет руно. Для этого режущий аппарат стригальной машинки (нож и гребенка) должным образом нужно подготовить – заточить и заправить. Нажимной механизм должен обеспечивать достаточное усилие прижатия ножа к гребенке и т.д. Нами принято четыре состояния технической подсистемы – Sу1, Sу2, Sу3, Sу4.
Эффективность системы, участвующей при механической обработке кожного покрова, заключается в получении качественной продукции: шерсти, пуха, молока. Поэтому, на наш взгляд, показателями эффективности функционирования БТС являются: качество обработки кожного покрова, физиологическое состояние животного, качество получаемой продукции.
В имеющихся источниках нами не обнаружены аналитические зависимости, описывающие процесс механической обработки кожного покрова животного, которые описывали бы сложные явления функционирования БТС. Нами предлагается использовать для математической модели процесса вероятностно-статистический принцип, в котором учитывались многие стороны функционирования подсистем и специфика физиологического состояния животного.
Вероятностно-статистический принцип применялся нами для построения наиболее обобщенных и адекватных математических моделей функционирования на множестве производственных условий. А это в свою очередь позволяет синтезировать системы и соответствующие им управляющие воздействия с учетом обеспечения максимальной эффективности функционирования в условиях стохастической природы внешней среды, неопределенности и изменения самой структуры рассматриваемой системы.
Методов математического описания сложных систем существует достаточно много [1, 3, 4]. Наиболее близкими к рассматриваемому процессу механической обработки кожного покрова животного являются марковские процессы с дискретным состоянием и непрерывным временем. В этом случае переходы системы из одного состояния в другое происходят не в фиксированные, а случайные моменты времени, которые заранее предсказать довольно сложно. К примеру, стресс животного может произойти в любой момент времени, и выход из этого состояния может произойти в неопределенный момент времени. Схема марковских случайных процессов с достаточной точностью описывает такие процессы в определенных условиях (при принятии ограничительных допущений), которые не противоречат статистическим и экспериментальным данным: число состояний конечно для каждого момента времени, вероятность любого состояния системы в последующем (при t > t0) зависит только от состояния системы в настоящем (t = t0) и не зависит от того, когда и каким образом система оказалась в этом состоянии.
Для более детального и информативного рассмотрения динамики изменений состояний биотехнической системы нами построен размеченный граф состояний (графовая математическая модель), представленный на рисунке. Вершинам графа соответствуют состояния Sо1, Sу1, Sж1. Принимаем, что это состояние системы является исходным или желательным. Каждому из этих состояний соответствует вероятность пребывания системы в этом состоянии Р(Sо1), Р(Sу1), Р(Sж1).
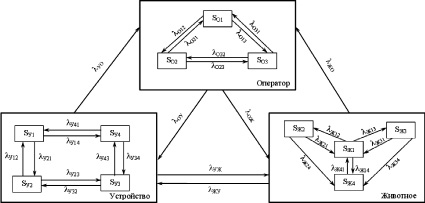
Графовая математическая модель процесса механической обработки кожного покрова животного
Необходимо выяснить, что будет происходить с вероятностями при t > ?, будут ли они стремиться к каким-либо пределам. Если эти пределы существуют и не зависят от начального состояния системы, то они называются финальными вероятностями системы. В теории случайных процессов доказывается, что если число состояний конечно и из каждого из них можно за конечное число шагов перейти в другое, то финальные вероятности существуют. Финальные вероятности в нашем случае следует понимать следующим образом: при t > ? в системе устанавливается предельный стационарный режим, в ходе которого система случайным образом меняет свои состояния, но их вероятности уже не зависят от времени t. Финальную вероятность состояний можно истолковать как среднее относительное время пребывания системы в этом состоянии.
Чтобы найти предельные вероятности, опишем процесс изменения системы с помощью модели, заданной системой дифференциальных уравнений.
В левой части каждого уравнения стоит производная вероятности состояния соответственно оператора, животного, устройства. При стационарном режиме функционирования биотехнической системы эти части уравнений становятся равными нулю, в этом случае система уравнений записывается уже как система алгебраических уравнений.
Значение λij (интенсивность перехода системы из одного состояния в другое) как правило, определяется по результатам статистических наблюдений или экспериментальным путем, на основании достаточного количества наблюдений.
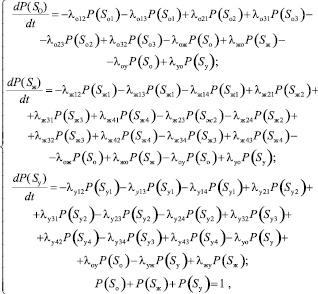
где λij – интенсивность перехода подсистемы из состояния Si в состояние Sj.
В результате решения системы алгебраических уравнений получаются алгебраические выражения для оценки вероятностей Р(Sо), Р(Sу), Р(Sж).
Кроме того, величина λij перехода системы из Si-го состояния в Sj-е, характеризует скорость протекания переходного процесса. Соответственно возможно установить зависимость скорости перехода от входных параметров подсистем, а также оценить качество взаимодействия подсистем, качественную составляющую от механизации того или иного процесса обработки кожного покрова.
Вероятность Р(Sij) позволяет оценить динамику функционирования системы в целом, а также определить, при каких условиях входных геометрических, технологических, режимных параметров технической подсистемы будет наиболее благоприятное состояние объекта воздействия (подсистемы животное). Таким образом, возможно решение задачи по определению оптимальных параметров управляющих воздействий, позволяющих обеспечить адекватную реакцию организма животного и способствовать полноценному использованию его генетического потенциала.
В общем виде, в результате решения системы дифференциальных уравнений получаем несколько числовых значений, характеризующих каждое состояние отдельно взятой подсистемы: вероятность ее пребывания в i-м или j-м состоянии Р(Sni…j) и интенсивность перехода λij из одного состояния в другое.
Используя эти показатели, можно оценить влияние любой подсистемы на эффективность функционирования системы в целом.
Предложенная модель и вышеизложенное показывают, что схема марковских процессов достаточно полно позволяет описать биотехническую систему.
Рецензенты:
Карташов Л.П., д.т.н., профессор кафедры механизации технологических процессов в АПК, Оренбургский государственный аграрный университет, г. Оренбург;
Ушаков Ю.А., д.т.н., профессор, зав. кафедрой математики и теоретической механики, Оренбургский государственный аграрный университет, г. Оренбург.
Работа поступила в редакцию 10.10.2014.
Библиографическая ссылка
Хлопко Ю.А., Осипова А.М. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ФУНКЦИОНИРОВАНИЯ БИОТЕХНИЧЕСКОЙ СИСТЕМЫ ПРОЦЕССА МЕХАНИЧЕСКОЙ ОБРАБОТКИ КОЖНОГО ПОКРОВА ЖИВОТНОГО // Фундаментальные исследования. – 2014. – № 11-3. – С. 534-539;URL: https://fundamental-research.ru/ru/article/view?id=35556 (дата обращения: 26.04.2024).