



Современный мир трудно представить без машин, осуществляющих подъем грузов различной тяжести. Грузоподъемные машины (ГПМ) широко применяются практически во всех сферах деятельности человека. В последние годы как в России, так и во всем мире, заметно участились случаи опрокидывания кранов и подъемников в результате проседания опорной поверхности под опорами. Падение крана ведет к его разрушению и порче груза, а также к травмированию или гибели оператора. Наряду с проседанием грунта часто происходят случаи опрокидывания крано-манипуляторных установок вследствие перегруза, ветровых нагрузок [2].
Целью написания статьи является развитие автоматизированных систем, обеспечивающих безопасную работу ГПМ. Применение данных систем в вооруженных силах Российской Федерации позволит существенно повысить эффективность эксплуатации и производительность ГПМ, а также снизит вероятность опрокидывания.
В настоящее время на российском рынке представлено множество ГПМ, имеющих платформу с аутригерами. Для всех этих машин необходимо во время работы выдерживать платформу в горизонтальном положении для соблюдения требований стандартов безопасности и эксплуатации.
В авиационных частях Вооруженных Сил Российской Федерации, в подразделениях обеспечения представлен широкий ряд ГПМ. Среди них присутствуют морально устаревшие образцы, которые по своим эксплуатационно-техническим характеристикам не удовлетворяют требованиям безопасности, предъявляемым к обслуживанию воздушных судов четвёртого поколения, а тем более к вновь разрабатываемым типам.
Отсутствие устройств автоматического выравнивания опорной платформы ГПМ в Вооруженных Силах Российской Федерации влияет на эффективность применения частей обеспечения, в частности, средств аэродромно-технического обеспечения полетов [9]. В боевых условиях основным показателем эффективности авиационного комплекса является оперативно-тактический критерий – производительность. Данный показатель измеряется количеством самолетовылетов. Эффективность обслуживания и подготовки к вылету воздушных судов существенно зависит от скорости перемещения грузов и технических характеристик.
Снижение трудоемкости, уменьшение времени, затрачиваемого на осуществление технологического процесса по обеспечению устойчивости ГПМ, исключение каких-либо операций, выполняемых оператором вручную при проведении грузоподъемных работ, являются сложными задачами. Решение данных задач возможно путем автоматизации операций, выполняемых оператором, за счет применения автоматических систем, что позволит значительно увеличить эффективность применения ГПМ.
Примером таких систем может послужить система, устанавливаемая на кране компании Locatelli. Она обеспечивает вытягивание аутригеров согласно диаграмме грузоподъемности, состоит из одного приемника и трех передатчиков на каждом аутригере. Каждый приемник аутригера отправляет сигнал конфигурации в центральный блок, который задает максимальный безопасный вес поднимаемого груза. При выходе за разрешенные пределы оператор получает звуковой и визуальный сигналы. Так же имеется несколько прототипов систем финских конструкторов. Но существуют также непредвиденные ситуации, которые электронный контроллер предусмотреть не может, например, резкое проседание грунта [2, 10].
Известны несколько устройств, обеспечивающих горизонтальное положение опорной платформы грузоподъемной машины. Такие устройства позволяют в автоматическом режиме управлять выдвижением гидравлических опор до достижения горизонтального положения платформы грузоподъемной машины в соответствии с показаниями регистрирующих приборов. Недостатками данных устройств являются недостаточная точность горизонтирования платформы, из-за отсутствия демпфирующих устройств, осуществляющих гашения колебаний при работе подъемного механизма, залипания коммутационных контактов, значительное затрачиваемое время на выравнивание опорной платформы [3, 4, 5, 6, 7].
Это означает, что существует необходимость дальнейшего улучшения характеристик ГПМ, связанная с разработкой конструкции различных устройств. Отсюда вытекает актуальная практическая задача по разработке автоматической системы выравнивания опорных платформ (АСВОП) ГПМ, исключающая аварийную эксплуатацию, обеспечивающая сокращение времени цикла работы и повышение производительности.
С целью повышения эффективности эксплуатации ГПМ, обеспечения необходимых условий безопасности при проведении грузоподъемных работ, осуществляемых под воздействием внешних факторов, в Военном учебно-научном центре Военно-воздушных сил «Военно-воздушной академии имени профессора Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж) была разработана автоматическая система выравнивания опорной платформы ГПМ и проведены ее экспериментальные исследования.
Испытаниям подвергалась экспериментальная установка, состоящая из штатного специального передвижного крана СПК-3 и разработанной АСВОП. На рис. 1 представлен СПК-3, оборудованный АСВОП с подключенной измерительно-регистрирующей аппаратурой. В качестве объекта исследования был выбран СПК-3 2008 года выпуска, заводской номер 3Р08.11.03.
Специальный передвижной кран СПК-3 предназначен для монтажа и демонтажа редуктора, двигателей, втулки несущего винта, лопастей, спецферм, хвостового редуктора, хвостового винта и других работ в соответствии с инструкцией по эксплуатации воздушных судов [8].
Перед испытаниями СПК-3 прошел техническое обслуживание и общую проверку технического состояния, был укомплектован полностью согласно технической документации [8].
Горюче-смазочные материалы кондиционны, соответствовали требованиям инструкции по эксплуатации.
При установке АСВОП на СПК-3 были выполнены следующие работы:
1. На выносные опоры специального передвижного крана СПК-3 установлены и жестко закреплены 4 гидравлических цилиндра.
2. На раме крана размещены основные элементы АСВОП (рис. 2).

Рис. 1. СПК-3, оборудованный АСВОП

Рис. 2. Размещение элементов АСВОП на раме СПК-3
В соответствии с намеченными целями и поставленными задачами была выбрана методика лабораторно-полевых исследований, соответствовавшая ГОСТ 16504-81 и предусматривавшая измерение и регистрацию нижеперечисленного комплекса параметров:
– время развертывания ГПМ;
– нормальные реакции опорной поверхности на гидравлические опоры;
– тяговое усилие при подъеме груза;
– давление масла в гидравлической системе;
– отклонение рамы ГПМ от горизонтального положения.
Во время проведения эксперимента производился подъем груза, фиксировалось время, затрачиваемое на развертывание ГПМ (вынос стоек опорного контура, выравнивание опорной платформы) и на возвращение в исходное положение, нагрузка на раму ГПМ в зависимости от положения груза. Для определения экономичности АСВОП проводился хронометраж его работы, и определялись следующие параметры:
– среднее время, затрачиваемое на развертывание ГПМ;
– среднее время рабочего цикла подъема груза;
– средняя скорость реакции АСВОП на отклонение опорной платформы от горизонтального положения в зависимости от положения груза и распределения нагрузки на аутригеры;
– часовой расход топлива;
– крутящий момент на валу привода редуктора.
Испытания ГПМ проводились на покрытиях с различной плотностью на заранее подготовленных участках.
Принцип работы АСВОП и ее состав представлены на рис. 3.
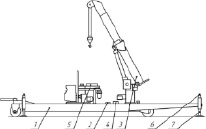
Рис. 3. СПК-3, оборудованный АСВОП: опорная платформа – 1, датчик контроля угла наклона опорной платформы – 2, грузоподъемная стрела – 3, блок управления – 4, панель управления – 5, датчики контакта штоков выносных гидравлических цилиндров с опорной поверхностью – 6, выносные опорные гидравлические цилиндры – 7
Автоматическая система выравнивания опорной платформы работает следующим образом. Перед началом работы оператор на панели управления 5 переводит тумблер в положение опускания штоков выносных гидравлических цилиндров 7, которое происходит до их контакта с опорной поверхностью. После срабатывания датчиков контакта штоков выносных гидравлических цилиндров с опорной поверхностью 6 сигнал подается в блок управления 4 на включение автоматического выравнивания опорной платформы 1. Осуществление выравнивания происходит по сигналу с датчика контроля угла наклона опорной платформы 2. При отклонении опорной платформы 1 от горизонтального положения датчик контроля угла наклона опорной платформы 2 подает сигнал в блок управления 3 на приведение в движение соответствующих выносных гидравлических цилиндров 7 [1].
В случае проседания одной из опор, когда создается угроза опрокидывания, датчик контроля угла наклона опорной платформы 2 подает сигнал в блок управления на приведение в действие соответствующего опорного гидроцилиндра.
При проведении экспериментальных исследований АСВОП оборудовалась различными датчиками контроля угла опорной платформы отличающимися конструкцией и техническими характеристиками. Разработанные коллективом авторов: Курганников И.В., Великанов А.В. и др., – датчики контроля угла наклона опорной платформы представлены ниже.
Рассмотрим конструкцию одного из них, в основе которого лежит использование токопроводящей жидкости, изображенного схематично на рис. 4.
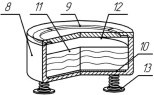
Рис. 4. Датчики контроля угла наклона опорной платформы: корпус – 8, четыре периферийных коммутационных контакта – 9, основной коммутационный контакт – 10, токопроводящая жидкость – 11, пространство, не заполненное жидкостью – 12, демпферное устройство для гашения вибрационных колебаний – 13
При отклонении опорной платформы 1 (рис. 3) от горизонтального положения токопроводящая жидкость замыкает коммутационные контакты 9–10 (рис. 4) сориентированные в направлении выносных гидроцилиндров, тем самым подает команду в блок управления 4 на приведение в движение соответствующих выносных гидравлических цилиндров 7 (рис. 3). Поверхность считается выровненной в том случае, когда токопроводящая жидкость не замыкает коммутационные контакты [1].
Еще одним из положительных качеств датчика контроля угла наклона опорной платформы является возможность замыкания 2 и даже 3 периферийных контактов одновременно, что сокращает время выравнивания опорной платформы ГПМ.
|
№ п/п |
Параметры |
СПК-3 |
СПК-3, оборудованная АСВОП |
Датчик контроля угла наклона опорной платформы |
|
|
Токопроводящая жидкость |
Коммутационный шар |
||||
|
1 |
Среднее время, затрачиваемое на развертывание грузоподъемной машины, мин. |
10,5 |
6 |
6 |
6,2 |
|
2 |
Среднее время рабочего цикла подъема груза, мин. |
14,5 |
10 |
10 |
10,2 |
|
3 |
Средняя скорость реакции АСВОП на отклонение опорной платформы от горизонтального положения, сек. |
– |
– |
2 |
4 |
|
4 |
Максимальное отклонение от горизонтального положения гр. |
4 |
2; 4 |
2 |
4 |
Другая конструкция датчика контроля угла наклона опорной платформы представлена на рис. 5. Принцип работы датчика основан на перемещении коммутационного шара 17. В случае отклонения опорной платформы от горизонтального положения, под воздействием горизонтальной составляющей силы тяжести коммутационный шар 17 замыкает контакты 14–15, тем самым подает сигнал в блок управления 4 на приведение в действие соответствующих выносных гидравлических цилиндров 7 рис. 3. Также как и у предыдущего датчика выравнивания опорной платформы возможна одновременная работа двух выносных гидравлических цилиндров, так как шар может замкнуть три контакта одновременно (основной и два периферийных).
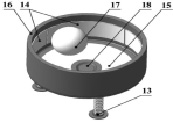
Рис. 5. Датчики контроля угла наклона опорной платформы: демпферное устройство – 13, четыре периферийных коммутационных контакта – 14, основной коммутационный контакт – 15, корпус – 16, контактный шар – 17, углубление по центру основания цилиндра для фиксации горизонтального положения – 18
В результаты проведенных исследований представлены в таблице сравнительных эксплуатационных показателей экспериментальных установок.
Из полученных результатов видно, что применение автоматизированной системы выравнивания сокращает время развертывания и время рабочего цикла специального передвижного крана СПК-3 на 4,5 минуты. Сравнивая датчики контроля угла наклона опорной платформы двух типов, видно преимущества датчика с токопроводящей жидкостью. Скорость реакции АСВОП на отклонение опорной платформы от горизонтального положения на 2 секунды меньше с датчиком контроля угла наклона опорной платформы, в основе которого лежит токопроводящая жидкость.
Таким образом, использование автоматической системы выравнивания опорной платформы значительно повышает эффективность и производительность грузоподъемных машин, а также снижает вероятность их опрокидывания, что, в свою очередь, влияет на боевую готовность частей Вооруженных сил Российской Федерации.
Рецензенты:
Барабаш Д.Е., д.т.н., профессор, начальник кафедры изыскания и проектирования аэродромов Военного учебно-научного центра Военно-воздушных сил, Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина, г. Воронеж;
Федюнин П.А., д.т.н., профессор, начальник кафедры управления воинскими частями С и РТО авиации Военного учебно-научного центра Военно-воздушных сил, Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина, г. Воронеж.