



С развитием робототехники все больший интерес проявляется к бионике – науке, которая изучает характер движения живых организмов, а также явления и процессы, протекающие в них. В природе распространены прыгающие и летающие насекомые. Копирование природных идей при создании роботов позволяет быстро и эффективно достичь поставленных результатов. Такой подход особенно востребован при создании роботов, способных скрытно перемещаться в пространстве для выполнения задач, связанных со сбором информации. Особый интерес представляют прыгающе-летающие роботы, в которых реализованы принципы полета насекомых. Такие роботы получили название инсектоптеры. Одним из преимуществ робота-инсектоптера является то, что энергопотребление при прочих равных по сравнению с традиционными схемами, например мультироторного типа, значительно ниже. Крылья с изменяемыми параметрами и геометрией могут быть переориентированы и адаптированы под текущие условия в каждый момент полета летательного аппарата, что позволяет максимально использовать энергию воздушных потоков и увеличить дальность свободного планирования. Поэтому ведущие научные центры мира ведут разработки по созданию малогабаритных летающих роботов с машущим крылом [1–7].
Описание робота
Рассматриваемый робот-стрекоза оснащен двумя оппозитно двигающимися крыльями, установленными на фюзеляже. В движение крылья приводятся с помощью электродвигателя и специальной трансмиссии, состоящей из синхронизатора и двух кривошипно-коромысловых механизмов. На фюзеляже также установлено хвостовое оперение, оснащенное рулями высоты и направления. При подаче напряжения на электродвигатель вращение передается на редуктор, а затем на зубчатую цилиндрическую передачу синхронизатора, которая представляет собой два зубчатых колеса одинакового диаметра, находящихся в зацеплении друг с другом и с шестерней, установленной на выходном валу редуктора. Мембраны крыльев, изготовленные из эластичного материала, закреплены на стрингерах, выполненных из жесткого материала (углепластика), создают необходимое тяговое усилие при схлопывании или разведении пары крыльев. Такая схема крыльев является уравновешенной и позволяет создавать реактивную струю воздуха, обеспечивающую соответствующее тяговое усилие и необходимую подъемную силу.
Модель робота-инсектоптера
Рассмотрим схему робота-инсектоптера, представленную на рис. 1. Движение такого объекта происходит в абсолютной системе координат Oxyz. С корпусом робота связана относительная, подвижная система координат C2x2y2z2, начало которой совпадает с центром тяжести корпуса С2. Ось C2x2 такой системы координат направлена параллельно продольной оси корпуса, ось C2y2 направлена перпендикулярно плоскости C2x2z2, а ось C2z2 – перпендикулярно плоскости C2x2y2. Плоскость C2x2z2 является плоскостью симметрии робота [3–5].
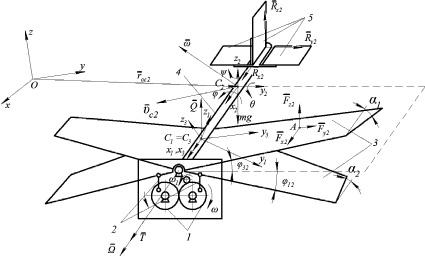
Рис. 1. Расчетная схема робота-инсектоптера
Центр масс корпуса движется в пространстве со скоростью  , а робот вращается вокруг центра масс с угловой скоростью
, а робот вращается вокруг центра масс с угловой скоростью  под действием распределенных сил, возникающих в результате взаимодействия элементов системы с окружающей средой Fi, приведенных к сосредоточенным силам тяги T = (T, 0, 0)T, подъемной силе Q = (0, 0, Q)Tи R2 = (R2x2, R2y2, R2z2)T – силы, действующей на хвостовое оперение со стороны набегающего потока воздуха. Кроме этого, учтены и силы веса
под действием распределенных сил, возникающих в результате взаимодействия элементов системы с окружающей средой Fi, приведенных к сосредоточенным силам тяги T = (T, 0, 0)T, подъемной силе Q = (0, 0, Q)Tи R2 = (R2x2, R2y2, R2z2)T – силы, действующей на хвостовое оперение со стороны набегающего потока воздуха. Кроме этого, учтены и силы веса

Далее принято допущение о том, что угловая скорость вращения крыла значительно выше угловой скорости вращения корпуса, что позволяет значительно упростить уравнения, описывающие вращательное движение робота. Кроме этого, принято, что мембраны крыла являются недеформируемыми невесомыми пластинами, имеющими возможность поворота относительно стрингера.
Полет инсектоптера можно разложить на несколько этапов, которые осуществляются под действием управляющих воздействий, поступающих со стороны бортовой системы управления. В первую очередь осуществляется отрыв от опорной поверхности и взлет. Набор высоты происходит в соответствии с выбранным законом изменения вертикальной координаты, после чего устройство начинает движение в горизонтальной плоскости в заданную точку пространства. В этой точке можно реализовать режим зависания, позволяющий производить разведку местности, видеосъемку и осуществлять необходимые измерения. После выполнения задания инсектоптер возвращается в исходную или любую определенную в задании точку и осуществляет посадку.
Для реализации автономного полета предложена схема системы автоматического управления (рис. 2), в соответствии с которой определение реальных координат робота осуществляется с помощью установленных в системе управления GPS-навигатора, гироскопа и альтиметра. Обработка данных, поступающих с датчиков, сравнение их с заданными, нахождение управляющих воздействий по отклонениям реальных координат от заданных, происходит в блоке отработки информации. Управляющие напряжения определяются с помощью многоканального регулятора и поступают на соответствующие электроприводы (ОYi). Модель робота-инсектоптера связывает три управляющих воздействия: угловая скорость вращения электродвигателя, углы поворота рулей высоты и направления ω, φ2, φ3, с шестью управляемыми координатами X, Y, Z, φ, ψ, θ, которые позволяют роботу двигаться по заданной пространственной траектории.
Для определения приведенной силы тяги Т и подъемной силы Q, создаваемых крылом, были проведены экспериментальные исследования на специальном стенде. Для этого был разработан и изготовлен прототип робота-стрекозы, общий вид которого приведен на рис. 3.
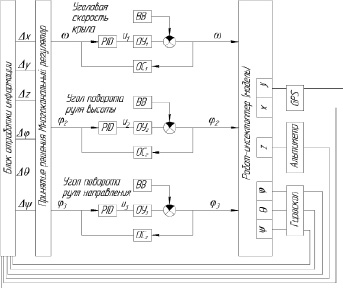
Рис. 2. Функциональная схема бортовой системы управления

Рис. 3. Общий вид прототипа робота-стрекозы
Сравнение результатов математического моделирования и экспериментов
Для изучения движения выполнено математическое моделирование движения прототипа робота, имеющего следующие параметры: вес корпуса m1 = 0,02 кг; вес крыльев m2 = 0,017 кг; длина крыла l = 0,35 м. Результаты математического моделирования сравнивались с экспериментальными данными в режимах взлёта на определенную высоту Н, полета в горизонтальной плоскости и приземления инсектоптера (рис. 4).
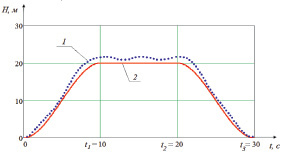
Рис. 4. Изменение вертикальной координаты в режимах взлёта, полета в горизонтальной плоскости и приземления инсектоптера во времени: 1 – эксперимент; 2 – теория
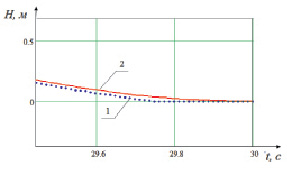
Рис. 5. Зависимость перемещения по оси z при приземлении инсектоптера (t = 29,7 c): 1 – эксперимент; 2 – теория
Особое внимание уделено изучению процесса посадки инсектоптера. Путем изменения параметров управляющих воздействий удалось обеспечить посадку робота практически с нулевой вертикальной скоростью (рис. 5).
Заключение
Разработана математическая модель робота-стрекозы с оппозитно движущимися крыльями с учетом свойств кривошипно-коромыслового электропривода и двухкоординатного вращения крыльев. Выполнено математическое моделирование полета робота. Спроектирован и изготовлен прототип летающего робота, оснащенный оппозитными машущими крыльями. Предложена методика определения приведенных сил тяги и подъемной силы. Установлена линейная зависимость между частотой колебаний крыльев и величиной этих сил, определены коэффициенты пропорциональности. Проведено математическое моделирование и экспериментальные исследования по пространственному движению робота, сравнение теоретических результатов с экспериментальными показывает удовлетворительную сходимость.
Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта № 14-08-00581 а.
Рецензенты:
Локтионова О.Г., д.т.н., профессор, проректор по учебной работе, ФГБОУ ВО «Юго-Западный государственный университет», г. Курск;
Кобелев Н.С., д.т.н., профессор, заведующий кафедрой теплогазоснабжения и вентиляции, ФГБОУ ВО «Юго-Западный государственный университет», г. Курск.