



Радиолокационные станции (РЛС) являются важнейшим инструментом обеспечения контроля за движением объектов различного типа [1–4]. Несмотря на развитость современных спутниковых средств навигации (например, автоматическая идентификационная система (АИС) в судовождении [6, 7]), именно радиолокационные средства продолжают составлять информационную основу систем наблюдения за морским и воздушным движением [8, 10], так как способны обеспечить бесперебойность и автономность их функционирования. Например, береговые и бортовые системы управления движением судов обязательно включают в себя одну или несколько РЛС кругового обзора.
Инструментальная компонента погрешности измерений координат наблюдаемых объектов обычно связывается с такими характеристиками РЛС, как ширина диаграммы направленности, длина волны, длина зондирующего импульса и частота посылок [8]. Компьютеризация РЛС и аналого-цифровое преобразование исходного эхо-сигнала вводит дополнительный фактор, влияющий на инструментальную погрешность измерений РЛС.
Аналого-цифровое преобразование эхо-сигнала характеризуется частотой и диапазоном его дискретизации. Высокая частота и большой диапазон дискретизации очень желательны, так как позволяют достигать высокой точности измерения координат наблюдаемых объектов и решать дополнительные задачи (например, выделять объекты на фоне помех, распознавать тип объекта по его радиолокационному образу, оценивать метеоусловия и т.п.) [3, 5]. Вместе с тем, высокие характеристики частоты и диапазона дискретизации приводят к значительным объемам получаемых данных. Суть проблемы в том, что передача данных от блока первичной обработки к блоку вторичной обработки распределённой информационной системы имеет ограничения по скорости, обусловленные характеристиками используемых компьютеров, программной платформы и сетевого оборудования. В условиях этих ограничений выбор тех или иных параметров аналого-цифрового преобразования исходного эхо-сигнала представляет собой актуальную задачу.
Настоящая работа посвящена исследованию ограничений характеристик систем наблюдения, создаваемых на основе компьютеризированных РЛС кругового обзора с использованием компьютерного оборудования и программных платформ общего назначения и связанных с конечностью скорости передачи данных в сети ЭВМ.
Основные проблемные аспекты и постановка задачи
Пусть имеется типовая РЛС кругового обзора с периодом обращения антенны Tφ и частотой посылок νφ (частота дискретизации по азимуту). При таких значениях количество линеек на один оборот антенны (то есть количество дискретных значений азимута) будет равно nφ = νφ Tφ.
Пусть шкале дальности РЛС соответствует время приёма линейки Tr. Пусть каждая линейка преобразуется аналого-цифровым устройством с частотой дискретизации νr в массив значений. Тогда число элементов в этом массиве значений (то есть количество дискретных значений дальности) у каждой линейки будет равно nr = νr Tr.
Один оборот антенны РЛС формирует радиолокационный образ наблюдаемого пространства, который путём аналого-цифрового преобразования представляется в виде матрицы амплитуд отражённого эхо-сигнала A с количеством строк, равным nφ, и количеством столбцов, равным nr. Матрица амплитуд обновляется с каждым оборотом антенны, то есть один раз за время Tφ.
Информационно-измерительная система, построенная на базе такой РЛС, имеет следующую архитектуру. Электрические видео- и синхронизирующие сигналы РЛС подаются на вход подключенного к ЭВМ аналого-цифрового преобразователя (АЦП). Полученная в результате такой первичной обработки матрица амплитуд A передаётся по сетевому протоколу другой ЭВМ для вторичной обработки, включающей в себя сопровождение траекторий наблюдаемых объектов, определение их параметров движения и визуализацию навигационной обстановки в пользовательском интерфейсе.
В общем случае производительность современных типовых ЭВМ достаточна для решения базовых задач первичной и вторичной обработки сигнала. Вместе с тем имея в виду большой объём матрицы A и её частое обновление, передача данных от блока первичной обработки к блоку вторичной обработки по сетевому протоколу является «узким местом» рассматриваемой компьютеризированной системы радиолокационного наблюдения.
Архитектура современных программных платформ (операционных систем) позволяет обеспечить построение распределённых информационных систем путём использования многозадачности и передачи данных между процессами. Эти процессы, составляющие программную основу распределённой информационной системы, могут быть запущены параллельно друг другу и обмениваться данными как на одной, так и на различных ЭВМ, соединённых сетью. Имеется целый ряд инструментов для обмена данными между процессами [9]: интерфейс динамического обмена данными (DDE интерфейс), почтовые слоты (mail slots), именованные каналы (pipes), сокеты (sockets), файлы, отображаемые в память (memory mapped files).
С учетом особенностей функциональности системы радиолокационного наблюдения для программной реализации обмена данными между блоками первичной и вторичной обработки наиболее подходящим является механизм именованных каналов (pipes). Его характеризуют возможность синхронизировать работу блока вторичной обработки (pipe клиента) c обновлением данных блока первичной обработки (pipe сервером). В настоящей работе ставится задача об оценке характерной скорости передачи данных от блока первичной к блоку вторичной обработки при использовании механизма именованных каналов (pipes) и, на её основе, оценке возможных предельных значений частот дискретизации радиолокационного образа по азимуту νφ и дальности νr, определяющих размерность матрицы амплитуд A. Оценку характерной скорости передачи данных от pipe сервера к pipe клиенту будем проводить по результатам натурных испытаний. Имеются две ЭВМ, соединённые локальной сетью. На одной из них запускается программа-сервер, создающая именованный канал и генерирующая и записывающая в него данные. На второй ЭВМ запускается программа-клиент, читающая данные из именованного канала.
Результаты натурных измерений скорости передачи данных
При постановке эксперимента использовались ЭВМ со следующими характеристиками: процессор Intel Core i5 с частотой 2,5 Ггц, память 4 Гб, сетевой адаптер со скоростью 1 Гбит/с, ОС Win7 (64). Такие характеристики вполне соответствуют определению «типовая ЭВМ общего назначения».
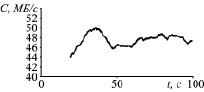
Рис. 1. Скорость передачи данных клиент – сервер
На рис. 1 показан график, характеризующий значения скорости передачи данных C от pipe сервера к pipe клиенту. Рисунок соответствует четвёртому сценарию. В момент времени t = 0 последовательно запускались процессы сервера и клиента, в момент времени t = 20 с (после стабилизации распределения ресурсов ЭВМ) начиналось логирование данных. Из графика видно, что скорость передачи данных составляет порядка 50 мегабайт в секунду (что более чем в 2 раза меньше теоретически возможной, обусловленной характеристиками используемого сетевого адаптера 1 Гбит/с). При этом имеют место колебания скорости порядка 5–10 %. Как показали эксперименты, значения скорости передачи данных близки во всех четырёх сценариях, то есть скорость передачи данных не зависит явно от загрузки ресурсов ЭВМ, если загрузка не экстремально велика.
Значения размерности матрицы амплитуд отражённого эхо-сигнала A (количество строк nφ и количество столбцов nr) при известных размере одного элемента матрицы s (определяется диапазоном дискретизации), скорости передачи данных от блока первичной обработки к блоку вторичной обработки C и периоде обращения антенны РЛС Tφ связаны соотношением

Разрешения по углу и дальности, обусловленные дискретизацией и выраженные в метрах, при размерности матрицы амплитуд nφ×nφ равны соответственно
 и
и 
где r – расстояние до наблюдаемого объекта; R – максимальная дальность работы РЛС (определяемая выбранной шкалой дальности).
Отметим, что для малых объектов, чьи геометрические размеры соизмеримы с разрешением РЛС, разрешение по углу δφ и дальности δr можно отождествлять с инструментальной погрешностью измерения соответствующих величин. Для больших, протяжённых объектов оцифрованный радиолокационный образ представляется некоей «подматрицей» матрицы амплитуд. Её значения коррелированы и распределены сложным образом. В этом случае инструментальная погрешность измерений дальности и азимута, безусловно, зависит от разрешения по углу и дальности, однако прямо отождествлять разрешение по углу и дальности с инструментальной погрешностью измерений не следует.
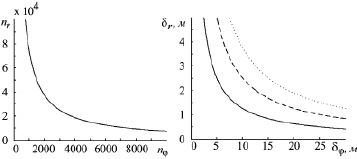
а б
Рис. 2. Размеры матрицы амплитуд и соответствующие разрешения по углу и дальности
Рис. 2 иллюстрирует возможные значения погрешностей измерения координат наблюдаемых объектов, если скорость передачи данных от блока первичной обработки к блоку вторичной обработки C составляет оцененные 50 Мбайт/с, период обращения антенны РЛС Tφ равен 3 с, а размер одного элемента матрицы амплитуд s равен 2 байта. На рис. 2, а показана зависимость максимального количества столбцов nr от количества строк nφ при указанных значениях. Например, если частота посылок РЛС соответствует 4000 линеек на один оборот антенны, то максимально возможное количество дискретных значений дальности равно приблизительно 20 000. На рис. 2, б показана зависимость разрешения по дальности δr от разрешения по углу δφ при R = 30 км и r = 5 км (сплошная линия), r = 10 км (пунктир), r = 15 км (точки). Видно, что, например, для объекта, находящегося на удалении r = 5 км, при разрешении по углу δφ, равном 4 метрам, разрешение по дальности δr равно 3 метрам.
Заключение
Как показывают приведённые в статье эксперименты и расчёты, реально достижимая на типовой ЭВМ со скоростью сетевого адаптера 1 Гбит/с скорость передачи данных составляет порядка 50 Мбайт/с. В этом случае обусловленная дискретизацией РЛС сигнала разрешимость радиолокационного образа наблюдаемых объектов на характерных дальностях 10–15 км составляет порядка 10–15 м. Такая разрешимость и соответствующая погрешность измерений достаточны для решения многих задач наблюдения, например, связанных с оценкой навигационной обстановки и обеспечением безопасности коллективного движения наблюдаемых объектов [2, 4].
Для задач, требующих на порядок меньшей погрешности измерения координат ~1 м [3, 5], для постоянной передачи к блоку вторичной обработки полной матрицы амплитуд необходима на два порядка большая скорость передачи данных ~5 Гбайт/с, недостижимая для типового сетевого оборудования общего назначения. Решение таких задач требует разработки специальных приёмо-передающих устройств и алгоритмов обработки данных.