



Исследованию методов проектирования трассы лесных автомобильных дорог посвящены работы ряда авторов [1, 3, 6, 12, 15]. В них предложено несколько методов проектирования с применением ЭВМ, отличающихся постановкой задачи, способами решения, характером геометрического представления трассы и другими особенностями.
По постановке задачи можно выделить следующие характерные группы методов проектирования трассы:
I. Методы, основанные на расчете однозначно-определенной трассы.
Этот метод основан на расчете закруглений вида: клотоида – круговая кривая – клотоида или клотоида – клотоида, вписываемых в углы тангенального полигона, обычно прикладываемого на местности. Необходимые для расчета геометрические характеристики закругления (радиус круговой кривой и длины переходных кривых) определяют либо из условия размещения тангенсов, либо исходя из принятой биссектрисы угла поворота трассы. В случае проработки трассы по крупномасштабным топографическим планам или материалам аэрофотосъемки тангентальный ход и необходимые геометрические характеристики намечаются на соответствующей топооснове камерально, путем детальной графической проработки трассы с применением шаблонов круговых и клотоидных кривых [2, 5, 16].
Некоторые работы по автоматизации проектирования лесных автомобильных дорог в плане были основаны на традиционном методе расчета трассы. В качестве топоосновы для проектирования с применением программы ЭВМ в виде магистрального геодезического хода с поперечниками в характерных местах (рисунок).
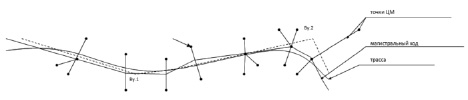
Трассирование с применением программы ЭВМ в виде магистрального геодезического хода
Анализ данного метода показал, что он является наиболее совершенным в группе методов расчета однозначно-определенной трассы. Вместе с тем в нем имеется ряд недостатков, а именно:
– поблочный подход к расчету трассы вызывает избыточное применение методов итерации, что снижает эффективность решения задачи в целом;
– отсутствует контроль выполнения нормальных требований к геометрическим характеристикам элементов трассы, получаемых в результате расчета, что может приводить к неудовлетворительным решениям;
– использование математического аппарата комплексных переменных ограничивает возможность применения некоторых алгоритмических языков, что создает трудности при программной реализации.
II. Методы сглаживания эскизной линии трассы в плане по геометрическим критериям. Характерной особенностью методов этой группы является то, что для расчета на ЭВМ берется избыточное количество информации о предварительно проработанной эскизной линии, не определяющее однозначно ось проектируемой дороги. Положение расчетной трассы отыскивается с использованием методов оптимизации из условия наилучшего приближения к заданной линии, притом в данной группе методов принят геометрический критерий оптимальности: величина максимального отклонения расчетной трассы от заданной или сумма квадратов отклонений [7–9, 14, 16].
Анализ данных методов показывает, что идея, реализованная в них, основанная на аналитическом разложении эскизной линии на проектные элементы трассы, безусловно, прогрессивная и открывает широкие возможности автоматизации проектирования трассы в плане. Вместе с тем в рассмотренных методах имеются следующие принципиальные недостатки:
– проектирование каждого варианта трассы осуществляется в несколько этапов, что не позволяет существенно сократить сроки и трудоемкость работ;
– не представляется возможным отказаться полностью от этапа графической проработки трассы, так как при относительно малых углах поворота невозможно без предварительной проработки шаблонами наметить последовательность элементов;
– имеются жесткие требования к заданию эскизной линии, что не дает возможности использовать не отвечающие этим требованиям модели эскизных линий трассы, что часто имеет место на практике.
Инженер В. Калогаро предложил метод полиномиального трассирования, получивший такое название потому, что трасса в нем составляется из участков полиномов.
Анализ данного метода показал следующее:
– методом полиномиального трассирования не контролируется величина изменения центробежного ускорения, возникающего при движении автомобиля по запроектированной дороге. Это приводит к тому, что получаемая в результате расчета трасса может не отвечать предъявленным требованиям в части обеспечения максимально допустимого, из условия удобства движения, нарастания центробежного ускорения. Следует также отметить, что, используя данный метод, трудно вносить коррективы в полученные проектные решения;
– если наносить контрольные точки трассы, руководствуясь главным образом экономическими соображениями и не прорабатывая ее графически, то трасса может получиться излишне извилистой или кривизна, хотя и будет направлена в одну сторону, может неконтролируемо то увеличиваться, то уменьшаться, что является недопустимым;
– назначить непротиворечивые ограничения (допуски отклонений точек от трассы и др.) без предварительной графической проработки, во многих случаях не представляется возможным (особенно в сложных условиях);
– решением уравнения являются коэффициенты полинома, однако по величине этих коэффициентов и выбранной степени полинома проектировщик никаким образом не может судить о качестве трассы. Поэтому для оценки трассы все равно необходимо переходить к понятиям, принятым при клотоидном трассировании, для чего в программе, реализующей метод полиномиального трассирования, осуществляется расчет так называемых параметров эквивалентных клотоид;
– при использовании полиномиального трассирования осложняется вынос трассы на местность. Это особенно ощутимо в условиях нашей страны из-за редкой геодезической опорной сети и из-за принятой одностадийной или двустадийной системы проектирования (за рубежом автомобильные дороги, как правило, проектируются в 3 стадии). Отмеченные особенности обуславливают необходимость на одной стадии проводить и планово-высотное обоснование, и вынос трассы на местность. В этом случае в результате неизбежного накопления неувязок в геодезических измерениях (хотя и допустимых) на участке примыкания магистрального хода, от которого осуществляется разбивка трассы, к опорной геодезической сети возникает необходимость корректировки трассы по фактическим геодезическим измерениям. Эта корректировка, как правило, заключается в пересчете одного угла закругления и осуществляется непосредственно в поле. При полиноминальном трассировании такая корректировка практически неосуществима;
– внедрение методов клотоидного трассирования в отечественной практике проектирования осуществляется с 1962 года. За прошедшие годы усилиями автомобильно-дорожных вузов, научно-исследовательских и проектных институтов проделана значительная работа по научно-технической подготовке кадров, свободно владеющих инженерным аппаратом для проектирования автомобильных дорог с использованием принципов клотоидного трассирования. Переход на полиномиальное трассирование вызовет необходимость соответствующей переподготовки специалистов.
Подводя итог анализа методов сглаживания с использованием полиномов, можно сделать вывод, что эти методы нельзя применять для окончательного трассирования, но можно использовать на этапе предварительной проработки трассы или для получения исходного приближения при последующей аппроксимации трассы клотоидами, круговыми кривыми, и прямыми.
III. Методы оптимизации трассы по технико-экономическому критерию.
Одна из первых работ, посвященных вопросам оптимизации трассы, принадлежит Г.Д. Аккерману [4]. В ней предложено отыскивать оптимальный вариант трассы железной дороги с использованием метода последовательного анализа вариантов, разработанного в Институте кибернетики B.C. Михайлевичем, Н.З. Шором и др. В дальнейшем это предложение получило развитие в работах А.С. Забышного, В.И. Федорова и Д.Г. Румянцева [10, 12] применительно к проектированию трассы автомобильных дорог. Оптимизация трассы c использованием методов, основанных на идеях динамического программирования, связана с рядом трудностей, как теоретического характера, так и практической реализации. По этой причине выдвинутые предложения не получили широкого применения в практике проектирования. Более реальной является задача отыскания зоны расположения вариантов близких к оптимальному, поставлена в работах [1, 9]. В этих работах сделаны также предложения по улучшению правила отбора вариантов в узлах пространственной сетки, совмещению узлов сетки и точек нерегулярной ЭВМ и др.
Другой подход к решению рассматриваемой задачи предложил И.В. Турбин. Оптимизация трассы в ней сводится к определению положения вершин углов поворота при вписании в лог или обходе высотного препятствия с использованием направленного поиска.
За рубежом данной проблеме также уделяется должное внимание. В работе А. Сзидло приводится метод оптимизации геометрических элементов трассы, в ней для упрощения расчетной схемы, трасса представлена как последовательность чередующихся прямых и круговых кривых.
Отличительной особенностью данной группы является то, что положение трассы отыскивается в заданной определенными характеристиками полосе варьирования из условия минимизации технико-экономического критерия (стоимости строительства или суммарных приведенных затрат) [4, 10–11, 13].
В геометрическом смысле трассы лесных автомобильных дорог в плане обычно принимаются в виде совокупности элементов постоянной кривизны (прямых и круговых кривых), которые соединены между собой элементами с переменной кривизной (переходными кривыми). В качестве переходных кривых в различных странах используются: клотоиды, степенные полиномы, логарифмические спирали, различные тормозные кривые и т.д.
Следует отметить основной недостаток предложенного метода: значительную чувствительность к назначению исходных параметров. Ошибки, обусловленные дискретизацией данных, могут привести, с одной стороны, к потере глобального оптимума, а с другой стороны, к тому, что найденная трасса не будет отвечать предъявляемым требованиям в геометрическом смысле.
Выводы
На основании анализа существующих отечественных и зарубежных методов проектирования трассы можно сделать следующие выводы:
1. Трассирование является наиболее важным этапом проектно-изыскательских работ, так как именно положение трассы определяет основные технико-экономические показатели проектируемой дороги. Принятые в отечественной практике технология и методы проектирования дорог не позволяют обеспечивать высокое качество выбора трассы. Это обуславливает необходимость и целесообразность проведения исследований и совершенствования технологии и методов автоматизированного проектирования трассы лесных автомобильных дорог с применением ЭВМ по материалам аэрофотосъемки или крупномасштабным топографическим планам в координатах.
2. Методы трассирования должны быть увязаны с принятой технологией проектирования. В свою очередь и выбор метода, и технология зависят от конкретных особенностей проектируемого объекта: природных условий, стадии проектирования, обеспеченности топографическими материалами и т.д. Этим обусловлено создание в различных странах ряда методов автоматизированного проектирования трассы, которые систематизированы в три группы:
а) методы, основанные на расчете однозначно-определенной трассы;
б) методы сглаживания эскизной линии трассы;
в) методы оптимизации трассы по технико-экономическим критериям.
3. В большинстве стран в практике проектирования автомобильных дорог применяются только методы однозначного расчета осей. Они достаточно эффективно используются при вариантном проектировании трассы. В ряде случаев (например, в стесненных условиях) эти методы незаменимы, что обусловлено целесообразностью разработки применительно к отечественным условиям метода опорных элементов, основанного на идеях расчета однозначно определенных осей, с устранением недостатков.
4. Развитие средств вычислительной техники в части автоматической регистрации координат с топографических материалов и аэрофотоснимков обусловило целесообразность разработки методов, основанных на идеях сглаживания намеченной проектировщиком эскизной линии. Наиболее перспективным направлением в данной группе следует считать сглаживание клотоидами, отрезками клотоид круговыми кривыми и прямыми в соответствии с требованиями клотоидного трассирования, выполняемое с применением методов нелинейного математического программирования.
5. Наибольшую перспективу открывает применение оптимизации по технико-экономическому критерию.
Предложенные ранее методы могут быть применены лишь на этапе предварительного трассирования из-за значительных упрощений, допущенных в них. На базе современной вычислительной техники принципиально возможно разработать методы оптимизации трассы по технико-экономическому критерию при фиксированном продольном профиле с применением методов нелинейного математического программирования.