



Пружинные механизмы (далее МП) – очень древние изобретения человеческого ума. Многие машины, такие как автотранспорт, гусеничные машины, сельскохозяйственные и другие, имеют в качестве подвески рычажные механизмы с пружинами растяжения или сжатия. Полагаем, что использование деревянных пружин было одним из самых ранних. Например, использование усилия изгиба деревянных жердей и т.д. На современном этапе развития техники используются в основном стальные пружины.
Анализ известных механизмов подвески в разных отраслях машиностроения и в литературных источниках показывает, что в настоящее время для исследователей и проектировщиков-конструкторов нет однозначного ответа и четких указаний по выбору параметров оптимизации пружинного механизма подвески [1, 4, 5].
Например, И.А. Беляев при проектировании МП токоприемников электроподвижного состава рекомендует принимать соотношение длины рычага присоединения пружины в пределах 0,08–0,10 по отношению к длине нижних подъёмных рамок, а среднее значение угла между осями рычагов двуплечего рычага γ = 60 град. Указанные соотношения, как показали наши исследования, не всегда приводят к соответствию механизма требуемым характеристикам.
Й. Раймпель отмечает: «Инженерный расчет должен быть экономически приемлем. При правильном его проведении с помощью понятных формул результат может быть быстро получен, при этом следует пренебрегать теми факторами, влияние которых незначительно», также указывает, что мягкая подвеска лучше обеспечивает сцепление с дорогой, чем жесткая подвеска, а недостаток мягкой подвески – увеличенный крен на поворотах [4].
Однако, как неоднократно отмечалось в работах профессора В.В. Белова [1], при проектировании и исследовании вертикальных колебаний МП в теории автомобильной техники не учитывается нелинейность изменения нагрузки на колесо, что не позволяет использовать весь потенциал МП и спроектировать его с требуемой упругой характеристикой.
Упругая характеристика автомобильных подвесок также зависит от всех параметров МП. В связи с отсутствием четкой теории и методики оптимизации при проектировании МП автомобилей разные авторы рекомендуют разный подход по оптимизации их параметров.
Аналогичное разночтение наблюдается при проектировании МП рабочих органов сельскохозяйственных машин, где самый многочисленный вариант МП, например на один зерноуборочный или кормоуборочный комбайн на некоторых модификациях устанавливают около 20 штук МП разных конструкций и соотношений звеньев [2, 5]. Спроектированные таким образом МП разных машин не всегда удовлетворяют предъявляемым к ним требованиям по упругой характеристике [1, 3, 4].
В основном исследователи считают, что колебательный процесс вызывается восстанавливающей силой, которой является сила упругости пружин [3–5]. В разработанных В.В. Беловым теоретических положениях анализа и синтеза пружинных механизмов [1] отмечается, что сила упругости пружины не всегда является восстанавливающей силой, а только при определенных соотношениях звеньев.
Цель исследования
В связи с изложенными обстоятельствами было решено провести экспериментальные исследования пружинного МП с цилиндрической пружиной с целью уточнения параметров оптимизации исследуемого механизма и проверки выдвинутой гипотезы.
Материалы и методы исследования
Основным объектом исследования принята физическая модель МП (рис. 1), который состоит из основания, шарнирно установленного двуплечего рычага, пружины растяжения, присоединенной к рычагам посредством гибкой тяги. Замер проводили динамометром, прикрепленным на конец рычага подвеса.

Рис. 1. Физическая модель МП
В ходе экспериментальных исследований постоянными оставались: С – жесткость пружины и её длина. Изменению подвергались γ – угол между рычагом подвеса и приложения силы динамометра, ΔН – приращение длины пружины, а замеряемым параметром был ΔР – приращение приведенной к точке подвеса нагрузки (усилия) пружины при разных положениях рычага подвеса.
За исходное (начальное) положение нами было принято горизонтальное положение рычага подвеса рабочего органа (динамометра). Диапазон перемещения по высоте точки подвеса составлял от 30 до 8 см с шагом 2 см. Замеры проводили плавным опусканием точки приложения усилия вниз и вверх, при этом в соответствующих положениях фиксировали нагрузку при движении вниз и вверх.
Эксперимент проводили в трехкратной повторности при разной величине угла между рычагами приложения усилия пружины и усилия динамометра: γ1 = 76 °; γ2 = 87 °; γ3 = 60 °. Полученные данные обрабатывались статистическими методами, а результаты обработки приведены на рис. 2, 3, 4.
Результаты исследования и их обсуждение
Полученные таким образом результаты экспериментальных исследований были обработаны и представлены в виде графиков. Результаты экспериментальных исследований показывают динамику изменения усилия на динамометре.
В 1-м опыте усилие имеет падающий характер в зависимости от положения рычага подвеса. Как показывают результаты исследований, при движении точки подвеса вверх и вниз упругие характеристики смещаются относительно друг друга, т.е. присутствует гистерезис при проведении замера. Такая особенность наблюдается во всех трех опытах (см. рис. 2, 3, 4) при разных значениях угла γ. Принятые обозначения на рисунках: y – уравнение полиномиальной линии тренда (уравнении регрессии); R – достоверность аппроксимации.
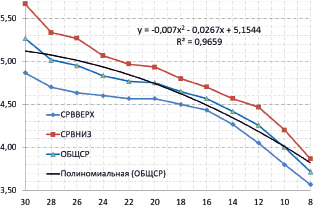
Рис. 2. График изменения показаний динамометра при угле γ = 76 °
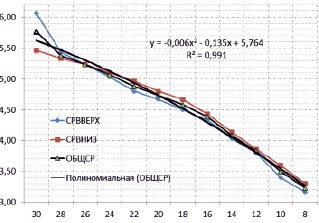
Рис. 3. Изменение показаний динамометра пружины при угле γ = 87 °
Рис. 2 свидетельствует о том, что усилие на точку подвеса во всем диапазоне перемещения падает, следовательно, при движении исполнительного рабочего органа, навешенного на МП с такой упругой характеристикой, возможны отклонения от требований к характеристике МП. Нарушения возможны вследствие увеличения нагрузки на исполнительный рабочий орган, например изменение нагрузки на колесо автомобиля или значительное изменение усилия натяжения приводного ремня и т.п., так как усилие пружины, передаваемое на точку подвеса (приведенное усилие), значительно уменьшается в зоне движения от 20–30 см.
Например, при движении точки подвеса около 28–30 см пружина развивает усилие около 5,27 кгс, если масса рабочего органа 6 кгс, то на исполнительный рабочий орган, например копирующий башмак косилки на почву, будет оказывать усилие 6 – 5,27 = 0,73 кгс, а при верхнем положении (высоте 8 см) усилие на башмак будет 6 – 3,72 =2,28 кгс.
Проведенные исследования МП во 2-м опыте при угле γ = 87 ° (см. рис. 3) показывают аналогичные результаты в сравнении с 1-м опытом.
Анализируя рис. 3 можно отметить, что усилие на точку подвеса в рассматриваемом диапазоне по мере ее перемещения уменьшается, следовательно, при движении исполнительного рабочего органа, навешенного на МП с такой упругой характеристикой, следует ожидать возможные нарушения процесса работы по вышеуказанным причинам.
Нарушения возможны вследствие увеличения нагрузки на исполнительное устройство, так как усилие пружины, передаваемое на точку подвеса (приведенное усилие), значительно уменьшается внизу (в зоне движения от 20–30 см). Например, при высоте расположения точки подвеса 30 см пружина развивает усилие около 5,77 кгс, если масса рабочего органа 6 кгс, то исполнительное устройство (например, копирующее устройство) на почву будет оказывать усилие 6 – 5,77 = 0,23 кгс, а при верхнем положении (при высоте 8 см) усилие на башмак будет 6 – 3,22 =2,78 кгс.
Проведенные исследования механизма подвески в 3-м опыте при угле γ = 60 ° (рис. 4) показывают совсем иной вид упругой характеристики МП. По данным, представленным в таблице, видно, что нагрузка на копирующее устройство меняется в обратную сторону в сравнении с предыдущими вариантами.
Анализ рис. 4 свидетельствует о том, что усилие на точку подвеса в рассматриваемом диапазоне по мере ее перемещения увеличивается, следовательно, при движении исполнительного устройства, навешенного на МП с такой упругой характеристикой, возможны нарушения рабочего процесса.
В рассматриваемом варианте нарушения работы исполнительного устройства возможны вследствие увеличения нагрузки на них в верхнем положении, а в предыдущих вариантах – в нижнем положении, так как усилие пружины, передаваемое на точку подвеса МП (приведенное усилие), значительно увеличивается внизу (в зоне движения от 20–30 см). Например, при высоте расположения точки подвеса 30 см пружина развивает усилие около 1,23 кгс, если масса рабочего органа 6 кгс, то исполнительное устройство (копирующий элемент) будет оказывать на почву усилие 6 – 1,23 = 4,77 кгс, а при верхнем положении (высоте 8 см) усилие на башмак будет 6 – 4,73 =1,27 кгс.
Сравнение трех исследованных вариантов МП показывает, что усилие в крайних точках МП значительно колеблется в зависимости от выбранного угла между рычагами.
Диапазон изменения усилий в крайних точках для 1-го опыта от 0,73 до 2,28 кгс.
Диапазон изменения усилий в крайних точках для 2-го опыта от 0,23 до 2,78 кгс.
Диапазон изменения усилий в крайних точках для 3-го опыта от 4,77 до 1,27 кгс.
Анализ результатов исследований позволяет сделать следующие выводы.
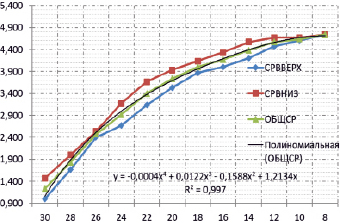
Рис. 4. Изменение показания динамометра пружины при угле γ = 60 °
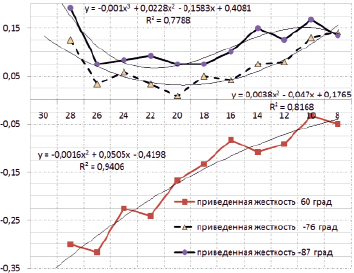
Рис. 5. Зависимость приведенной жесткости от высоты расположения точки подвеса при разных углах γ
При изменении угла между рычагами кардинально изменяется упругая характеристика МП. Очевидно, что приведенная жесткость подвески, определяемая как соотношение приращения нагрузки к приращению перемещения, может иметь как положительное значение, так и отрицательное, а в переходной зоне может быть равна нулю. Как показывает характер изменения (рис. 5) приведенной жесткости по результатам эксперимента, она не может быть постоянной величиной для рассмотренного варианта МП.
Сравнение характера изменения приведенной жесткости подтверждает значительный перепад приведенной жесткости в зависимости от положения точки подвеса по высоте.
Анализ рис. 5 изменения приведенной жесткости показывает, что значение исследуемого параметра в крайних точках МП по высоте значительно колеблется в зависимости от выбранного угла между рычагами.
Величина приведенной жесткости при угле 60 град имеет отрицательный знак и диапазон изменения от 0,033 до 0,317 кгс/см.
Величина приведенной жесткости при угле 76 град имеет положительный знак и диапазон изменения при высоте 30 см составляет 0,125 в средней зоне – 0,008, а при высоте 8 см – 0,142 кгс/см.
Величина приведенной жесткости при угле 87 град также имеет положительный знак и диапазон изменения при высоте 30 см составляет 0,192 в средней зоне – 0,075, а при высоте 8 см – 0,133 кгс/см.
Полученные результаты показывают, что приведенная жесткость МП может быть равна нулю, что исследователи не учитывают при проектировании МП. Как известно из положений теоретической механики и основ теории колебаний, при нулевом значении приведенной жесткости колебательный процесс в МП исключается.
Очевидно, что МП с переменной приведенной жесткостью требует дополнительных исследований не только в статике, но и в динамике.
Выводы
Исследования разных вариантов МП показали, что имеется возможность обеспечения стабильности выходного усилия, передающегося на исполнительные устройства за счет изменения угла между рычагами МП исполнительного рабочего органа.
Интенсивность изменения приведенного усилия пружины в точку подвеса зависит от угла между двуплечим рычагом МП. В то же время следует отметить, что характер изменения упругой характеристики МП в зависимости от величины угла между двуплечим рычагом может быть как возрастающим, так и убывающим.
Как известно из положений теоретической механики [3], полученные результаты можно интерпретировать как работу МП исполнительного рабочего органа [1, 2, 5], например МП автомобиля, копирующего устройства сельскохозяйственной машины, натяжного устройства приводного ремня и т.д. Результаты исследований подтверждают изменчивость упругой характеристики МП в зависимости от принятого значения угла между рычагами. Полученные результаты экспериментальных исследований полностью согласовываются с аналогичными исследованиями [1, 2] и подтвердили наши предположения об ошибочности общепринятого мнения о том, что упругая характеристика подвески зависит от жесткости пружины.
Предложенный метод исследования и полученные результаты показывают о возможности изменения упругой характеристики путем изменения угла между рычагами приложения усилий. Методика свидетельствует о неиспользованном потенциале МП по обеспечению стабильности или изменения выходного усилия по требованиям и условиям работы исполнительного устройства.
Полученные результаты исследования подтверждают нашу гипотезу об ошибочности имеющегося метода оптимизации пружинных МП, в котором основным параметром оптимизации принято считать жесткость пружины.
Библиографическая ссылка
Белов В.В., Капитонов Ф.В., Петров К.М. УТОЧНЕННАЯ МЕТОДИКА ИССЛЕДОВАНИЯ ПРУЖИННОГО МЕХАНИЗМА ПОДВЕСКИ // Фундаментальные исследования. – 2017. – № 11-1. – С. 24-29;URL: https://fundamental-research.ru/ru/article/view?id=41892 (дата обращения: 05.05.2024).