



Допустимая по условиям безопасности скорость движения автомобиля должна обеспечивать: устойчивость автомобиля в пределах полосы движения; возможность полной остановки в пределах расстояния видимости.
Длина тормозного пути должна быть меньше или в пределе, равном расстоянию видимости, что и является основным условием при определении безопасной скорости движения.
При определении тормозного пути автомобиля обычно рассматривается так называемое «аварийное торможение», т.е. торможение с максимальной интенсивностью, как правило, сопровождающееся юзом колес автомобиля, потерей устойчивости и управляемости. Такое торможение может явиться причиной аварий или аварийной ситуации. Поэтому при определении безопасной скорости следует рассматривать не «аварийное торможение», а торможение, не приводящее к потере устойчивости и управляемости.
Как известно [1], у современных автомобилей соотношение между тормозными моментами передних и задних мостов является постоянной величиной, определяющейся конструкцией тормозных механизмов и привода. Это соотношение выбирается из условия обеспечения полного использования сцепного веса автомобиля в конкретных дорожных условиях, характеризуемых расчетным коэффициентом сцепления jр. Обычно при конструировании тормозных систем принимают jр = 0,4–0,45.
При торможении на дороге с коэффициентом сцепления меньше расчетного при чрезмерном нажатии на тормозную педаль в первую очередь начнется блокировка колес переднего моста, следствием чего может быть потеря управляемости автомобиля. При торможении же на дороге, коэффициент сцепления на которой выше расчетного значения, сначала будет происходить блокировка задних колес автомобиля, что может привести к заносу автомобиля [1]. Эти условия и определяют величину замедления автомобиля при торможении c высокой начальной скоростью – водитель прекращает увеличивать давление на тормозную педаль при возникновении опасности блокировки колес переднего и заднего мостов.
Высказанная гипотеза может быть положена в основу расчета возможного замедления автомобиля. При этом принято, как это считается в теории движения автомобиля, что торможение происходит на прямом горизонтальном участке дороги, а сопротивление воздуха не оказывает практического влияния на величину тормозного пути [2].
Если торможение происходит по дороге, имеющей коэффициент сцепления меньше jр (ограничение тормозной силы по блокировке колес переднего моста), то суммарная тормозная сила может быть найдена из соотношений

где  и
и  – тормозные силы на переднем и заднем мостах.
– тормозные силы на переднем и заднем мостах.
Так как соотношение между тормозными силами переднего и заднего мостов
 ,
,
то
Величина максимальной тормозной силы для переднего моста равна

где  – нормальная реакция по передним мостам; ϕv – коэффициент сцепления.
– нормальная реакция по передним мостам; ϕv – коэффициент сцепления.
Тогда
 (1)
(1)
На рис. 1 представлена схема сил, действующих на автомобиль при торможении. Составляя уравнение моментов относительно оси, проходящей через точку опор задних колес, находим
 (2)
(2)
где L – база автомобиля; b – расстояние от заднего моста до центра тяжести; hg – высота центра тяжести.
Учитывая, что G = Mag и Pτ = Pj, находим величину нормальной реакции под передним мостом.
 (3)
(3)
где Pj – сила инерции, которая равна Pj = MajT; jT – ускорение замедления автомобиля; Ma – масса автомобиля.
Из уравнения (1) находим нормальную реакцию под передним мостом:
 (4)
(4)
Приравнивая правые части выражения (3) и (4) и сделав соответствующие преобразования, получим выражение для ускорения замедления при торможении:
 (5)
(5)
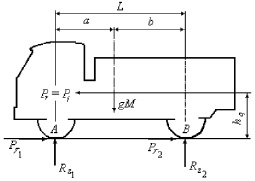
Схема сил, действующих на автомобиль при торможении
Если торможение происходит на дороге, имеющей коэффициент сцепления больше jр, то рост тормозной силы прекратится в момент, когда на колесах заднего моста будет достигнута максимальная тормозная сила сцепления. Составив уравнение моментов относительно оси, проходящей через точку опор передних колес, и выполнив соответствующие преобразования, получим выражение для нахождения ускорения замедления:
 (6)
(6)
где а – расстояние от переднего моста до центра тяжести.
Полный остановочный путь автомобиля  складывается из пути, проходимого автомобилем за время реакции S0, и тормозного пути Sτ.
складывается из пути, проходимого автомобилем за время реакции S0, и тормозного пути Sτ.

Длина пути S0 зависит от начальной скорости автомобиля v0, продолжительности реакции водителя tp, времени срабатывания привода tпр и времени нарастания замедления tз.
Таким образом,
 (7)
(7)
По данным tр = 0,2...1,5 с, tпр = 0,2 с (для гидравлического привода); tпр = 1,5...0,2 с (для автопоездов с пневматическим приводом).
Если известно ускорение замедления автомобиля, то тормозной путь может быть найден следующим образом. Допустим, что в течение малого промежутка времени Δt ускорение замедления постоянно и равно jT. Если в момент времени t = t1 скорость автомобиля равна n, то скорость в момент t + Δt будет равна
 (8)
(8)
Путь ΔSi, проходимый автомобилем за время Δt, равен
 (9)
(9)
Если скорость в конце торможения равна vk, то тормозной путь находится
 (10)
(10)
В формулах (4) и (5) по определению замедления входит коэффициент сцепления ϕv. Из выполненных исследований [3] известно, что этот коэффициент зависит от многих факторов, в том числе и от скорости движения. Поэтому при определении допускаемых скоростей движения, особенно в области их высоких значений, необходимо учитывать зависимость коэффициента сцепления от скорости. При расчете допускаемой скорости принята линейная зависимость коэффициента сцепления от скорости вида
ϕv = ϕ0(1 – Av0), (11)
где ϕ0 – коэффициент сцепления, замеренный при малой скорости; A – коэффициент, зависящий от состояния покрытий, типа шин и скорости движения.
Для асфальтобетонных покрытий можно принять A = 0,015 – 0,03.
Была разработана программа расчета тормозного пути на участках с ограниченной видимостью в профиле на ЭВМ.
При расчете допускаемых скоростей нами рассматривались два предельных состояния автомобиля.
Состояние А – тормозная система с минимальным запаздыванием, оптимальная развесовка, внимательный и быстро реагирующий водитель.
Состояние В – тормозная система с большим запаздыванием, неоптимальная развесовка, водитель с замедленной реакцией.
Расчеты проводились применительно к параметрам автомобиля МАЗ-509А. Коэффициент распределения тормозных моментов βt определяется по выражению

при ϕp = 0,45.
При расчетах допускаемых скоростей необходимо оставлять также определенный запас сцепления для восприятия боковых сил и компенсации неточности выбора водителем режима торможения.
Рецензенты:Сушков С.И., д.т.н., профессор кафедры технологии и машин лесозаготовок, ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта;
Павлов А.И., д.т.н., профессор кафедры лесных, деревообрабатывающих машин и материаловедения, ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта.
Работа поступила в редакцию 18.03.2015.